
การเติบโตของเศรษฐกิจเครื่องจักร: Web3 ผลักดันหุ่นยนต์จากเครื่องมือสู่ระบบอัตโนมัติได้อย่างไร
- 核心观点:机器人产业正迈向“物理+智能+金融+组织”的系统性重塑。
- 关键要素:
- 技术成熟:AI、仿真、硬件多技术收敛,实现规模化部署。
- 资本涌入:巨额融资验证产业拐点与商业化路径。
- 经济赋能:Web3提供支付、身份与协作框架,支撑机器自主经济。
- 市场影响:催生新商业模式与协作网络,重塑价值捕获方式。
- 时效性标注:长期影响
การแนะนำ
ในช่วงไม่กี่ปีที่ผ่านมา อุตสาหกรรมหุ่นยนต์ได้เห็นจุดเปลี่ยนสำคัญสองประการ ทั้งในด้านเทคโนโลยีและรูปแบบธุรกิจ ในอดีต หุ่นยนต์ถูกมองว่าเป็นเพียง "เครื่องมือ" ที่ต้องพึ่งพาการวางแผนจากบริษัทต่างๆ ไม่สามารถทำงานร่วมกันได้อย่างอิสระ และขาดความสามารถทางเศรษฐกิจ อย่างไรก็ตาม ด้วยการบูรณาการเทคโนโลยีใหม่ๆ เช่น AI Agents การชำระเงินบนบล็อกเชน (x402) และเศรษฐกิจเครื่องจักร ระบบนิเวศของหุ่นยนต์กำลังพัฒนาจากระบบการแข่งขันด้านฮาร์ดแวร์แบบมิติเดียวไปสู่ระบบที่ซับซ้อนหลายชั้น ซึ่งประกอบด้วย "ร่างกาย—สติปัญญา—การชำระเงิน—การจัดการ"
สิ่งที่น่าสังเกตยิ่งกว่าคือ ตลาดทุนทั่วโลกกำลังประเมินแนวโน้มนี้อย่างรวดเร็ว Morgan Stanley คาดการณ์ว่าตลาดหุ่นยนต์ฮิวมานอยด์อาจมีมูลค่าถึง 5 ล้านล้านดอลลาร์ภายในปี 2050 ซึ่งจะผลักดันการเติบโตในอุตสาหกรรมที่เกี่ยวข้อง เช่น ห่วงโซ่อุปทาน การดำเนินงานและการบำรุงรักษา และบริการต่างๆ ในปีเดียวกันนั้น คาดว่าจำนวนหุ่นยนต์ฮิวมานอยด์ที่ใช้งานอยู่จะเกิน 1 พันล้านตัว ซึ่งหมายความว่าหุ่นยนต์จะเปลี่ยนจากอุปกรณ์อุตสาหกรรมไปเป็น "ผู้มีส่วนร่วมทางสังคมขนาดใหญ่" อย่างแท้จริง (1)
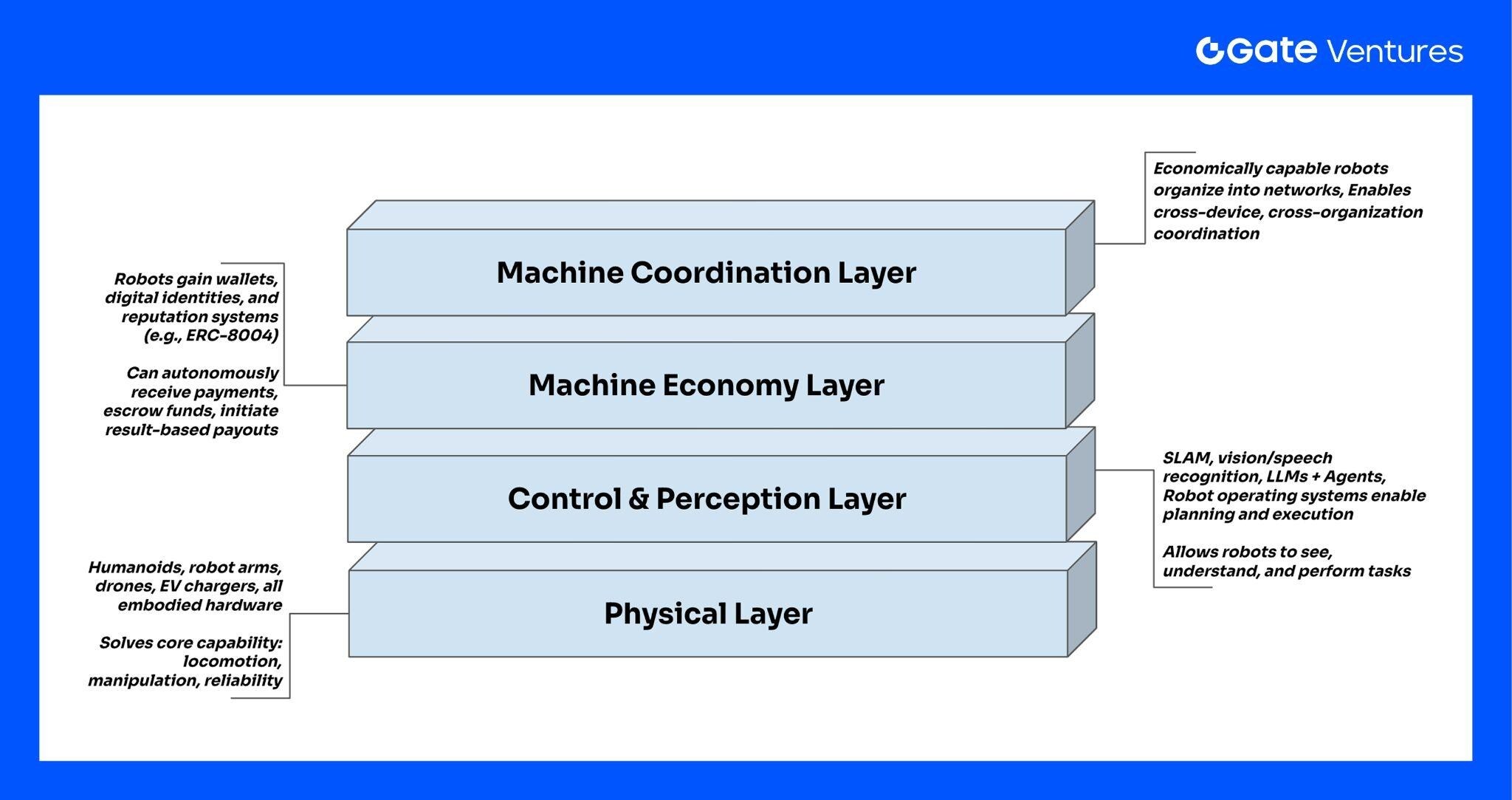
เพื่อให้เข้าใจทิศทางการพัฒนาในอนาคตของอุตสาหกรรมหุ่นยนต์ เราสามารถมองระบบนิเวศทั้งหมดเป็นโครงสร้างสี่ชั้นได้ดังนี้:
ที่มา: Gate Ventures
ชั้นแรกคือชั้นกายภาพ (Physical Layer): ซึ่งรวมถึงยานพาหนะที่มีรูปร่าง เช่น หุ่นยนต์ แขนหุ่นยนต์ โดรน และสถานีชาร์จรถยนต์ไฟฟ้า สิ่งเหล่านี้ตอบโจทย์ความสามารถในการเคลื่อนที่และการปฏิบัติงานขั้นพื้นฐาน เช่น การเดิน การจับ การทำงานที่เชื่อถือได้ทางกลไก และต้นทุน อย่างไรก็ตาม เครื่องจักรในชั้นนี้ยังขาด "ความสามารถทางเศรษฐกิจ" หมายความว่าพวกมันไม่สามารถดำเนินการต่างๆ ได้ด้วยตนเอง เช่น การชาร์จ การชำระเงิน หรือการซื้อบริการ
ชั้นที่สองคือชั้นควบคุมและการรับรู้: ชั้นนี้ครอบคลุมถึงระบบไซเบอร์เนติกส์ของหุ่นยนต์แบบดั้งเดิม, SLAM, ระบบการรับรู้, การจดจำเสียงและภาพ ไปจนถึง LLM+Agent ในปัจจุบัน และระบบปฏิบัติการหุ่นยนต์จำนวนมากขึ้นเรื่อยๆ ที่มีความสามารถในการวางแผนเชิงนามธรรม (เช่น ROS และ OpenMind OS) ชั้นนี้ช่วยให้เครื่องจักรสามารถ "เข้าใจ มองเห็น และดำเนินการตามภารกิจ" ได้ แต่กิจกรรมทางเศรษฐกิจ เช่น การชำระเงิน สัญญา และการตรวจสอบตัวตน ยังคงต้องอาศัยการแทรกแซงจากมนุษย์ในเบื้องหลัง
ชั้นที่สามคือชั้นเศรษฐกิจเครื่องจักร: การเปลี่ยนแปลงที่แท้จริงเริ่มต้นที่นี่ เครื่องจักรเริ่มมีกระเป๋าเงินดิจิทัล ตัวตนดิจิทัล และระบบชื่อเสียง (เช่น ERC-8004) และชำระค่าพลังการประมวลผล ข้อมูล พลังงาน และสิทธิ์ในการใช้ทางโดยตรงผ่านกลไกต่างๆ เช่น x402 การชำระเงินบนบล็อกเชน และการเรียกกลับบนบล็อกเชน นอกจากนี้ยังสามารถเก็บรวบรวมการชำระเงิน จัดการเงินทุน และเริ่มต้นการชำระเงินตามผลลัพธ์สำหรับการทำงานต่างๆ ได้ด้วยตนเอง ชั้นนี้เปลี่ยนหุ่นยนต์จาก "สินทรัพย์ขององค์กร" ไปเป็น "ตัวแทนทางเศรษฐกิจ" ทำให้พวกมันสามารถมีส่วนร่วมในตลาดได้
ชั้นที่สี่คือชั้นการประสานงานของเครื่องจักร: เมื่อหุ่นยนต์จำนวนมากมีขีดความสามารถในการชำระเงินและระบุตัวตนได้เองแล้ว พวกมันสามารถจัดระเบียบเพิ่มเติมเป็นกลุ่มและเครือข่าย เช่น ฝูงโดรน เครือข่ายหุ่นยนต์ทำความสะอาด เครือข่ายพลังงานรถยนต์ไฟฟ้า เป็นต้น พวกมันสามารถปรับราคา จัดตารางการทำงาน ประมูลงาน แบ่งปันรายได้ และแม้กระทั่งก่อตั้งหน่วยงานทางเศรษฐกิจอิสระในรูปแบบของ DAO ได้โดยอัตโนมัติ
จากโครงสร้างสี่ชั้นข้างต้น เราสามารถเห็นได้ว่า:
ระบบนิเวศหุ่นยนต์ในอนาคตจะไม่ใช่แค่การปฏิวัติฮาร์ดแวร์อีกต่อไป แต่จะเป็นการปรับเปลี่ยนระบบโดยรวมของ "กายภาพ + อัจฉริยะ + การเงิน + องค์กร"
สิ่งนี้ไม่เพียงแต่กำหนดขอบเขตความสามารถของเครื่องจักรใหม่เท่านั้น แต่ยังกำหนดวิธีการสร้างมูลค่าใหม่ด้วย ไม่ว่าจะเป็นบริษัทหุ่นยนต์ นักพัฒนา AI ผู้ให้บริการโครงสร้างพื้นฐาน หรือโปรโตคอลการชำระเงินและการระบุตัวตนที่ใช้คริปโตเคอร์เรนซี ทุกฝ่ายจะพบที่ของตนในเศรษฐกิจหุ่นยนต์ยุคใหม่นี้
เหตุใดอุตสาหกรรมหุ่นยนต์จึงเฟื่องฟูในขณะนี้?
เป็นเวลาหลายทศวรรษแล้วที่อุตสาหกรรมหุ่นยนต์ยังคงวนเวียนอยู่ในห้องปฏิบัติการ บูธจัดแสดง และสถานการณ์ทางอุตสาหกรรมเฉพาะกลุ่ม โดยอยู่ห่างจากการนำไปใช้ในเชิงพาณิชย์และการใช้งานในสังคมในวงกว้างเพียงแค่ก้าวเดียว อย่างไรก็ตาม หลังจากปี 2025 ก้าวนี้เริ่มถูกก้าวข้ามไปแล้ว ไม่ว่าจะเป็นจากมุมมองของตลาดทุน ความพร้อมของเทคโนโลยี หรือการประเมินของผู้สังเกตการณ์ในอุตสาหกรรม เช่น เจนเซน หวง ซีอีโอของ Nvidia ทุกอย่างต่างส่งสัญญาณเดียวกัน:
“ช่วงเวลาสำคัญของ ChatGPT สำหรับหุ่นยนต์ทั่วไปกำลังจะมาถึงแล้ว”
การประเมินนี้ไม่ได้เป็นการกล่าวเกินจริง แต่เป็นไปตามสัญญาณสำคัญสามประการของอุตสาหกรรม:
1. พลังการประมวลผล การสร้างแบบจำลอง การจำลอง การรับรู้และการควบคุม และความสามารถพื้นฐานอื่นๆ ล้วนพัฒนาไปพร้อมๆ กัน
2. ปัญญาประดิษฐ์ของหุ่นยนต์กำลังพัฒนาจากระบบควบคุมแบบปิดไปสู่การตัดสินใจแบบเปิด โดยมี LLM/เอเจนต์เป็นตัวขับเคลื่อน
3. การก้าวข้ามจากความสามารถแบบแยกส่วนไปสู่ความสามารถเชิงระบบ: หุ่นยนต์จะเปลี่ยนจาก "การทำงานแบบอิสระ" ไปสู่ "การทำงานร่วมกัน การทำความเข้าใจ และมีประสิทธิภาพทางเศรษฐกิจ"
หวง เหรินซุน ยังคาดการณ์เพิ่มเติมว่า หุ่นยนต์ฮิวมานอยด์จะถูกนำมาใช้อย่างแพร่หลายในอีก 5 ปีข้างหน้า ซึ่งสอดคล้องกับพฤติกรรมของตลาดทุนและการนำไปใช้ในอุตสาหกรรมในปี 2025 เป็นอย่างมาก
จากมุมมองด้านเงินทุน: การระดมทุนจำนวนมหาศาลพิสูจน์ให้เห็นว่า "จุดเปลี่ยนของหุ่นยนต์" นั้นได้ถูกประเมินราคาโดยตลาดไปแล้ว
ในช่วงปี 2024-2025 อุตสาหกรรมหุ่นยนต์ได้เห็นการระดมทุนที่หนาแน่นและมีขนาดใหญ่เป็นประวัติการณ์ โดยมีการระดมทุนหลายรอบที่มีมูลค่าเกิน 500 ล้านดอลลาร์สหรัฐในปี 2025 เพียงปีเดียว ตัวอย่างทั่วไปได้แก่:
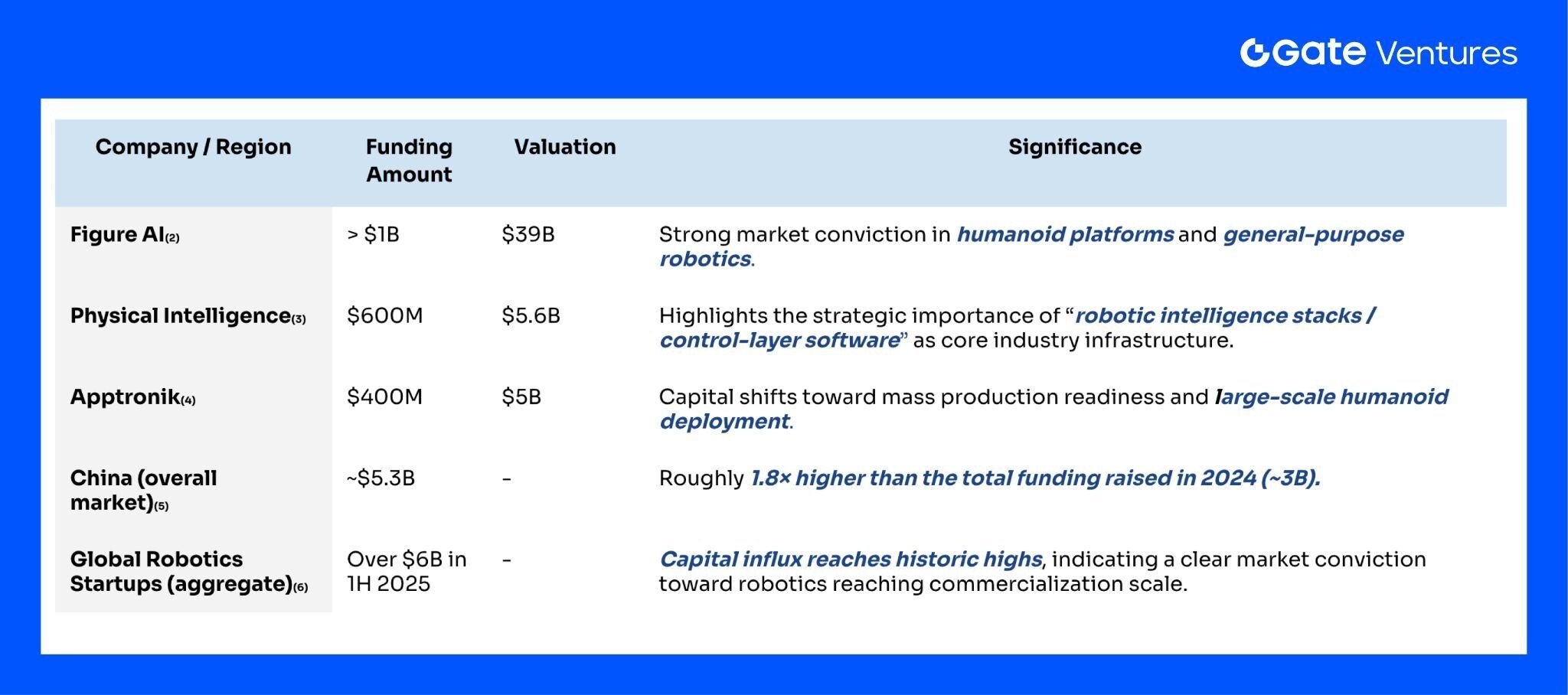
ที่มา: Gate Ventures
บริษัท Capital ได้แสดงให้เห็นอย่างชัดเจนว่า อุตสาหกรรมหุ่นยนต์ได้ก้าวมาถึงจุดที่การลงทุนมีความคุ้มค่าแล้ว
การจัดหาเงินทุนเหล่านี้มีลักษณะร่วมกันดังต่อไปนี้:
● นี่ไม่ใช่ "การระดมทุนเพื่อพัฒนาแนวคิด" แต่เป็นการมุ่งเน้นไปที่สายการผลิต ห่วงโซ่อุปทาน ข้อมูลเชิงกลยุทธ์ และการนำไปใช้ในเชิงพาณิชย์
● นี่ไม่ใช่การรวบรวมโครงการที่แยกส่วนกัน แต่เป็นระบบที่ครอบคลุมซึ่งบูรณาการฮาร์ดแวร์และซอฟต์แวร์ สถาปัตยกรรมแบบครบวงจร และบริการตลอดวงจรชีวิตสำหรับหุ่นยนต์
เงินทุนจำนวนมหาศาลไม่ได้ถูกนำมาลงทุนโดยพลการ แต่เป็นการสะท้อนให้เห็นถึงความเติบโตเต็มที่ของอุตสาหกรรมนี้
แง่มุมทางเทคนิค: ความก้าวหน้าครั้งสำคัญเกิดขึ้นพร้อมกัน
ในปี 2025 อุตสาหกรรมหุ่นยนต์ได้เห็นการบรรจบกันของเทคโนโลยีหลายอย่างอย่างที่ไม่เคยมีมาก่อน ประการแรก ความก้าวหน้าในด้านเอเจนต์ AI และแบบจำลองภาษาขนาดใหญ่ได้เปลี่ยนหุ่นยนต์จากเพียง "เครื่องจักรที่ใช้งานได้" ที่สามารถทำตามคำสั่ง ไปเป็น "เอเจนต์อัจฉริยะที่เข้าใจได้" ซึ่งสามารถเข้าใจภาษา แบ่งงานออกเป็นส่วนๆ และใช้เหตุผลโดยใช้ทั้งการมองเห็นและการสัมผัส ประการที่สอง การรับรู้แบบหลายโมดอลและแบบจำลองการควบคุมรุ่นใหม่ (เช่น RT-X และ Diffusion Policy) ทำให้หุ่นยนต์มีขีดความสามารถพื้นฐานที่ใกล้เคียงกับปัญญาประดิษฐ์ทั่วไปเป็นครั้งแรก
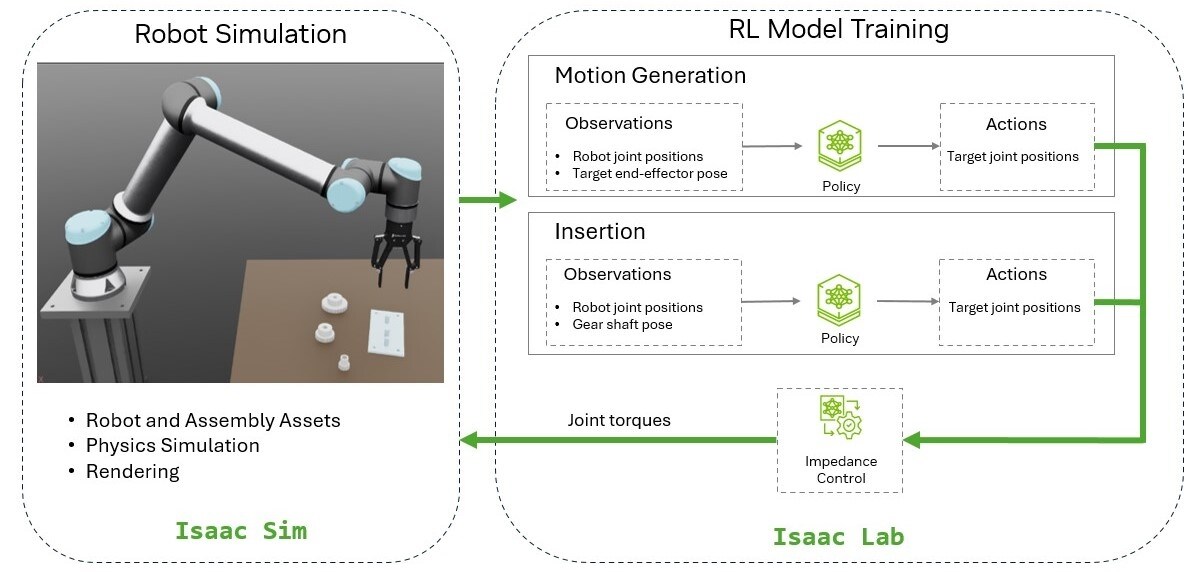
ที่มา: Nvidia
ในขณะเดียวกัน เทคโนโลยีการจำลองและการถ่ายทอดความรู้ก็พัฒนาไปอย่างรวดเร็ว สภาพแวดล้อมการจำลองที่มีความแม่นยำสูง เช่น Isaac และ Rosie ช่วยลดช่องว่างระหว่างการจำลองและความเป็นจริงได้อย่างมาก ทำให้หุ่นยนต์สามารถฝึกฝนในสภาพแวดล้อมเสมือนจริงได้ในวงกว้างด้วยต้นทุนที่ต่ำมาก และถ่ายทอดการเรียนรู้ไปยังโลกแห่งความเป็นจริงได้อย่างน่าเชื่อถือ ซึ่งช่วยแก้ปัญหาคอขวดพื้นฐานของความเร็วในการเรียนรู้ของหุ่นยนต์ที่ช้า การเก็บรวบรวมข้อมูลที่มีราคาแพง และความเสี่ยงสูงในสภาพแวดล้อมจริง
การพัฒนาฮาร์ดแวร์ก็มีความสำคัญไม่แพ้กัน ส่วนประกอบหลัก เช่น มอเตอร์แรงบิด โมดูลข้อต่อ และเซ็นเซอร์ มีต้นทุนลดลงอย่างต่อเนื่องเนื่องจากการขยายขนาดห่วงโซ่อุปทาน และการเติบโตอย่างรวดเร็วของจีนในห่วงโซ่อุปทานหุ่นยนต์ระดับโลกได้ช่วยเพิ่มผลผลิตของอุตสาหกรรมให้ดียิ่งขึ้นไปอีก ด้วยบริษัทหลายแห่งที่เริ่มแผนการผลิตจำนวนมาก หุ่นยนต์จึงมีรากฐานทางอุตสาหกรรมที่ "สามารถทำซ้ำและขยายขนาดได้" เป็นครั้งแรก
สุดท้ายนี้ การปรับปรุงด้านความน่าเชื่อถือและประสิทธิภาพการใช้พลังงานทำให้หุ่นยนต์สามารถตอบสนองความต้องการขั้นต่ำสำหรับการใช้งานเชิงพาณิชย์ได้อย่างแท้จริง การควบคุมมอเตอร์ที่ดีขึ้น ระบบความปลอดภัยสำรอง และระบบปฏิบัติการแบบเรียลไทม์ ช่วยให้หุ่นยนต์ทำงานได้อย่างเสถียรเป็นเวลานานในสภาพแวดล้อมระดับองค์กร
ปัจจัยเหล่านี้ทำให้วงการหุ่นยนต์สามารถก้าวจาก "ขั้นตอนการสาธิตในห้องปฏิบัติการ" ไปสู่ "การใช้งานจริงในวงกว้าง" ได้เป็นครั้งแรก นี่คือเหตุผลสำคัญที่ทำให้เกิดการเติบโตอย่างรวดเร็วของอุตสาหกรรมหุ่นยนต์ในปัจจุบัน
การนำไปสู่เชิงพาณิชย์: จากต้นแบบสู่การผลิตจำนวนมากและการใช้งานจริง
ปี 2025 ยังเป็นปีที่เห็นได้ชัดเจนว่าเส้นทางการนำหุ่นยนต์มาใช้ในเชิงพาณิชย์เริ่มเป็นรูปเป็นร่างขึ้น บริษัทชั้นนำอย่าง Apptronik, Figure และ Tesla Optimus ต่างประกาศแผนการผลิตจำนวนมาก ซึ่งแสดงให้เห็นว่าหุ่นยนต์ฮิวมานอยด์ได้ก้าวจากต้นแบบไปสู่ขั้นตอนการผลิตเชิงอุตสาหกรรมที่สามารถทำซ้ำได้แล้ว ในขณะเดียวกัน บริษัทหลายแห่งเริ่มทดลองใช้งานในสถานการณ์ที่มีความต้องการสูง เช่น คลังสินค้าและโลจิสติกส์ และระบบอัตโนมัติในโรงงาน เพื่อตรวจสอบประสิทธิภาพและความน่าเชื่อถือของหุ่นยนต์ในสภาพแวดล้อมจริง
ด้วยการพัฒนาขีดความสามารถในการผลิตฮาร์ดแวร์จำนวนมาก โมเดล "การดำเนินงานในรูปแบบบริการ (Operation-as-a-Service: OaaS)" จึงเริ่มได้รับการยอมรับจากตลาด องค์กรต่างๆ ไม่จำเป็นต้องจ่ายค่าซื้อล่วงหน้าในราคาสูง แต่สามารถสมัครใช้บริการหุ่นยนต์เป็นรายเดือน ซึ่งช่วยเพิ่มผลตอบแทนจากการลงทุน (ROI) ได้อย่างมาก โมเดลนี้ได้กลายเป็นนวัตกรรมทางธุรกิจที่สำคัญซึ่งขับเคลื่อนการใช้งานหุ่นยนต์ในวงกว้าง
นอกจากนี้ อุตสาหกรรมกำลังเร่งเติมเต็มช่องว่างในระบบบริการที่ขาดหายไปก่อนหน้านี้ รวมถึงโครงสร้างพื้นฐาน เช่น เครือข่ายการซ่อมแซม การจัดหาชิ้นส่วนอะไหล่ และแพลตฟอร์มการตรวจสอบและบำรุงรักษาระยะไกล ด้วยความสามารถเหล่านี้ หุ่นยนต์จึงเริ่มมีเงื่อนไขที่ครบถ้วนสำหรับการทำงานอย่างต่อเนื่องและรูปแบบธุรกิจแบบครบวงจร
โดยรวมแล้ว ปี 2025 เป็นปีแห่งความก้าวหน้าครั้งสำคัญสำหรับหุ่นยนต์ ซึ่งเป็นจุดเปลี่ยนจาก "สามารถผลิตได้หรือไม่" ไปสู่ "สามารถจำหน่าย ใช้งาน และมีราคาที่เหมาะสมได้หรือไม่" โดยเส้นทางการค้าเชิงพาณิชย์แสดงให้เห็นถึงวัฏจักรเชิงบวกที่ยั่งยืนเป็นครั้งแรก
ระบบนิเวศหุ่นยนต์ Web3 X
ด้วยการคาดการณ์ว่าอุตสาหกรรมหุ่นยนต์จะเติบโตอย่างเต็มรูปแบบในปี 2025 เทคโนโลยีบล็อกเชนจึงได้เข้ามามีบทบาทสำคัญ โดยเสริมระบบหุ่นยนต์ด้วยความสามารถหลักหลายประการ คุณค่าหลักของบล็อกเชนสามารถสรุปได้เป็น 3 ด้านหลัก ได้แก่ i) การรวบรวมข้อมูลสำหรับเทคโนโลยีหุ่นยนต์ ii) เครือข่ายการประสานงานระหว่างเครื่องจักร และ iii) เครือข่ายเศรษฐกิจของเครื่องจักรที่สนับสนุนการมีส่วนร่วมของเครื่องจักรแบบอัตโนมัติในตลาด
การกระจายอำนาจควบคู่กับแรงจูงใจด้วยโทเค็นทำให้เกิดแหล่งข้อมูลใหม่สำหรับการฝึกหุ่นยนต์ แต่คุณภาพของข้อมูลยังคงขึ้นอยู่กับระบบประมวลผลข้อมูลเบื้องหลัง (Data Engine) ในการปรับปรุง
อุปสรรคสำคัญในการฝึกฝนโมเดล Physical-AI อยู่ที่ขนาดของข้อมูลในโลกแห่งความเป็นจริง การครอบคลุมฉาก และความขาดแคลนข้อมูลปฏิสัมพันธ์ทางกายภาพคุณภาพสูง การเกิดขึ้นของ DePIN/DePAI ทำให้ Web3 สามารถนำเสนอโซลูชันใหม่ๆ สำหรับคำถามที่ว่า "ใครเป็นผู้ให้ข้อมูล และจะให้ข้อมูลอย่างยั่งยืนได้อย่างไร"
อย่างไรก็ตาม จากมุมมองการวิจัยเชิงวิชาการ แม้ว่าข้อมูลแบบกระจายศูนย์จะมีศักยภาพในแง่ของขนาดและความครอบคลุม แต่ก็ไม่ได้เทียบเท่ากับข้อมูลฝึกฝนคุณภาพสูงโดยเนื้อแท้ ข้อมูลเหล่านั้นยังคงต้องได้รับการคัดกรอง ทำความสะอาด และควบคุมอคติโดยระบบประมวลผลข้อมูลเบื้องหลังก่อนที่จะสามารถนำไปใช้ฝึกฝนโมเดลขนาดใหญ่ได้อย่างแท้จริง
ประการแรก Web3 แก้ไขปัญหาเรื่อง "พลวัตของการจัดหาข้อมูล" มากกว่าที่จะรับประกัน "คุณภาพของข้อมูล" โดยตรง
ข้อมูลการฝึกหุ่นยนต์แบบดั้งเดิมส่วนใหญ่มาจากห้องปฏิบัติการ กลุ่มยานพาหนะขนาดเล็ก หรือการรวบรวมภายในองค์กร ซึ่งไม่เพียงพอต่อขนาดที่เพิ่มขึ้นอย่างรวดเร็ว
โมเดล DePIN/DePAI ของ Web3 ใช้โทเค็นเป็นสิ่งจูงใจเพื่อให้ผู้ใช้ทั่วไป ผู้ให้บริการอุปกรณ์ หรือผู้ให้บริการระยะไกลสามารถเป็นผู้ให้ข้อมูลได้ ซึ่งจะช่วยเพิ่มขนาดและความหลากหลายของแหล่งข้อมูลได้อย่างมาก
โครงการนี้ประกอบด้วย:
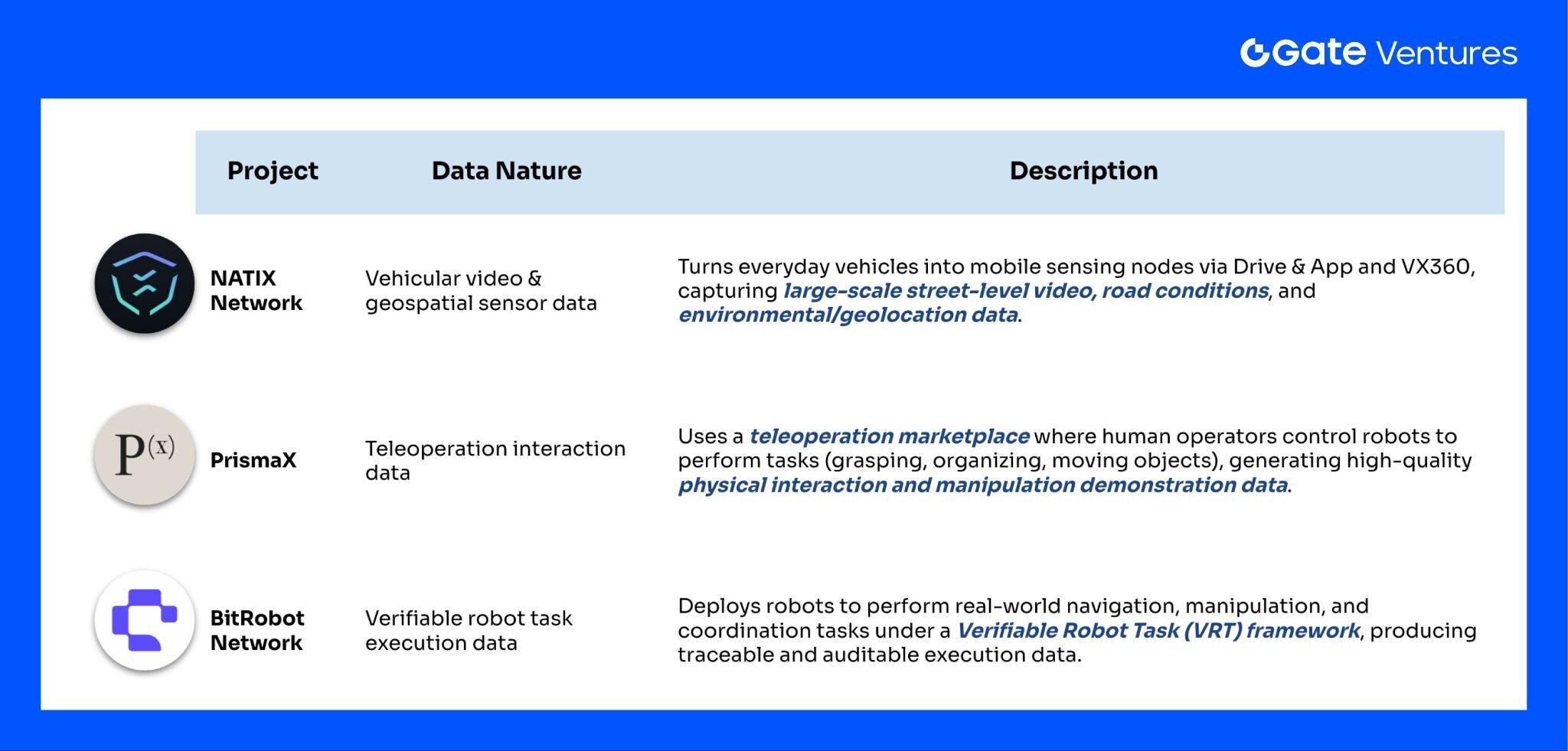
ที่มา: Gate Ventures
● เครือข่าย NATIX: เปลี่ยนรถยนต์ Volkswagen ให้เป็นศูนย์กลางข้อมูลเคลื่อนที่ผ่าน Drive & App และ VX360 โดยรวบรวมข้อมูลวิดีโอ ข้อมูลทางภูมิศาสตร์ และข้อมูลด้านสิ่งแวดล้อม
● PrismaX: รวบรวมข้อมูลปฏิสัมพันธ์ทางกายภาพของหุ่นยนต์คุณภาพสูง (การจับ การคัดแยก และการเคลื่อนย้ายสิ่งของ) ผ่านการควบคุมระยะไกล
● เครือข่าย BitRobot: ช่วยให้โหนดหุ่นยนต์สามารถปฏิบัติงานที่ตรวจสอบได้ (VRTs) ซึ่งจะสร้างข้อมูลเกี่ยวกับการปฏิบัติงานในโลกแห่งความเป็นจริง การนำทาง และพฤติกรรมการทำงานร่วมกัน
โครงการเหล่านี้แสดงให้เห็นว่า Web3 สามารถขยายขอบเขตการจัดหาข้อมูลได้อย่างมีประสิทธิภาพ เสริมสถานการณ์ในโลกแห่งความเป็นจริงและสถานการณ์ที่ซับซ้อนซึ่งระบบแบบดั้งเดิมไม่สามารถรองรับได้
อย่างไรก็ตาม จากงานวิจัยทางวิชาการพบว่า ข้อมูลที่รวบรวมจากกลุ่มคนจำนวนมาก/ข้อมูลแบบกระจายศูนย์ มักประสบปัญหาเชิงโครงสร้าง เช่น "ความแม่นยำไม่เพียงพอ มีสัญญาณรบกวนสูง และมีอคติมาก" งานวิจัยทางวิชาการมากมายเกี่ยวกับการรวบรวมข้อมูลจากกลุ่มคนจำนวนมากและการรับรู้ข้อมูลจากกลุ่มคนจำนวนมากผ่านอุปกรณ์เคลื่อนที่ ชี้ให้เห็นว่า:
1. คุณภาพข้อมูลผันผวนอย่างมาก มีสัญญาณรบกวนและความแตกต่างของรูปแบบอย่างเห็นได้ชัด
ความแตกต่างในด้านอุปกรณ์ วิธีการทำงาน และความเข้าใจของผู้มีส่วนร่วมต่างๆ อาจนำไปสู่ข้อมูลที่ไม่สอดคล้องกันจำนวนมาก ซึ่งจำเป็นต้องตรวจจับและคัดกรอง
2. อคติเชิงโครงสร้างพบได้ทั่วไป
ผู้เข้าร่วมมักกระจุกตัวอยู่ในพื้นที่/กลุ่มเฉพาะ ทำให้เกิดความคลาดเคลื่อนระหว่างการกระจายตัวของการสุ่มตัวอย่างกับการกระจายตัวในโลกแห่งความเป็นจริง
3. ข้อมูลดิบที่รวบรวมจากผู้คนจำนวนมากไม่สามารถนำมาใช้ฝึกโมเดลได้โดยตรง
การวิจัยเกี่ยวกับการขับขี่อัตโนมัติ ปัญญาประดิษฐ์แบบฝังตัว และหุ่นยนต์ เน้นย้ำอย่างกว้างขวางว่าชุดข้อมูลฝึกฝนคุณภาพสูงต้องอาศัยกระบวนการที่สมบูรณ์: การรวบรวม → การตรวจสอบคุณภาพ → การจัดเรียงความซ้ำซ้อน → การเพิ่มข้อมูล → การเติมเต็มข้อมูลส่วนท้าย → การแก้ไขความสอดคล้องของป้ายกำกับ แทนที่จะเป็น "การรวบรวมและใช้งานทันที" (7)
ดังนั้น เครือข่ายข้อมูลของ Web3 จึงมีแหล่งข้อมูลที่หลากหลายกว่า แต่จะสามารถนำมาใช้เป็นข้อมูลฝึกฝนได้โดยตรงหรือไม่นั้น ขึ้นอยู่กับการจัดการข้อมูลเบื้องหลัง
คุณค่าที่แท้จริงของ DePIN อยู่ที่การจัดหาโครงสร้างพื้นฐานข้อมูลที่ "ต่อเนื่อง ปรับขนาดได้ และต้นทุนต่ำ" สำหรับปัญญาประดิษฐ์เชิงกายภาพ (Physical AI)
แทนที่จะบอกว่า Web3 แก้ปัญหาความแม่นยำของข้อมูลได้ทันที การพูดว่ามันแก้ปัญหาต่อไปนี้จะแม่นยำกว่า:
● "ใครบ้างที่ยินดีให้ข้อมูลในระยะยาว?"
● จะส่งเสริมให้มีการเชื่อมต่ออุปกรณ์จริงมากขึ้นได้อย่างไร?
● เราจะเปลี่ยนรูปแบบการเก็บรวบรวมข้อมูลจากแบบรวมศูนย์ไปสู่เครือข่ายเปิดที่ยั่งยืนได้อย่างไร?
กล่าวอีกนัยหนึ่ง DePIN/DePAI เป็นรากฐานสำหรับการขยายขนาดและการครอบคลุมของข้อมูล ทำให้ Web3 เป็นส่วนสำคัญของ "ชั้นแหล่งข้อมูล" ในยุคปัญญาประดิษฐ์เชิงกายภาพ แต่ไม่ใช่สิ่งรับประกันคุณภาพข้อมูลเพียงอย่างเดียว
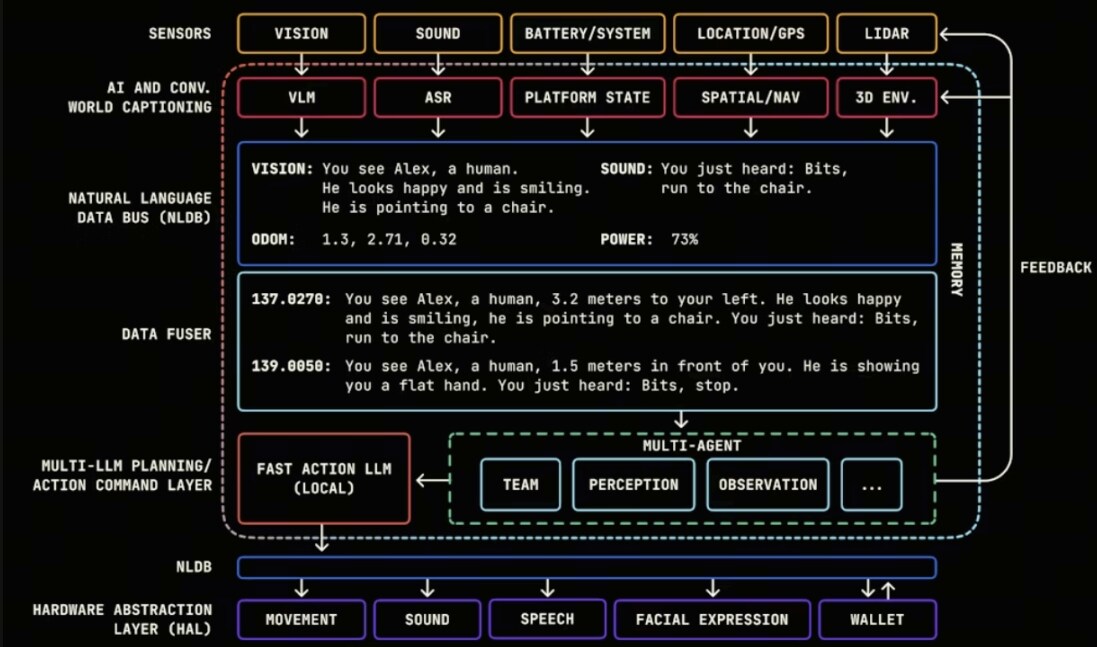
เครือข่ายการประสานงานเครื่องจักรข้ามอุปกรณ์: ระบบปฏิบัติการอเนกประสงค์ทำหน้าที่เป็นชั้นการสื่อสารพื้นฐานสำหรับการทำงานร่วมกันของหุ่นยนต์
ปัจจุบันอุตสาหกรรมหุ่นยนต์กำลังเปลี่ยนผ่านจากระบบอัจฉริยะแบบเดี่ยวๆ ไปสู่การทำงานร่วมกันเป็นกลุ่ม แต่ปัญหาคอขวดที่สำคัญยังคงอยู่ นั่นคือ หุ่นยนต์จากแบรนด์ รูปแบบ และเทคโนโลยีที่แตกต่างกันไม่สามารถแบ่งปันข้อมูล ทำงานร่วมกัน หรือใช้สื่อการสื่อสารที่เป็นมาตรฐานเดียวกันได้ สิ่งนี้บังคับให้การทำงานร่วมกันของหุ่นยนต์หลายตัวต้องพึ่งพาระบบปิดที่สร้างโดยผู้ผลิต ซึ่งจำกัดการใช้งานในวงกว้างอย่างมาก
ในช่วงไม่กี่ปีที่ผ่านมา การเกิดขึ้นของเลเยอร์ระบบปฏิบัติการหุ่นยนต์อเนกประสงค์ (เลเยอร์ ROS) ซึ่งนำเสนอโดย OpenMind ได้นำเสนอวิธีแก้ปัญหาใหม่ ระบบเหล่านี้ไม่ใช่ "ซอฟต์แวร์ควบคุม" ในความหมายดั้งเดิม แต่เป็นระบบปฏิบัติการอัจฉริยะที่ครอบคลุมตัวหุ่นยนต์ เช่นเดียวกับ Android ในอุตสาหกรรมโทรศัพท์มือถือ ระบบเหล่านี้มีภาษาทั่วไปและโครงสร้างพื้นฐานสาธารณะสำหรับการสื่อสาร การรับรู้ ความเข้าใจ และการทำงานร่วมกันระหว่างหุ่นยนต์ (8)
ในสถาปัตยกรรมแบบดั้งเดิม เซ็นเซอร์ ตัวควบคุม และโมดูลการอนุมานภายในหุ่นยนต์แต่ละตัวจะแยกออกจากกัน ทำให้ไม่สามารถแบ่งปันข้อมูลเชิงความหมายระหว่างอุปกรณ์ได้ อย่างไรก็ตาม เลเยอร์ระบบปฏิบัติการอเนกประสงค์ ผ่านอินเทอร์เฟซการรับรู้แบบรวม รูปแบบการตัดสินใจ และวิธีการวางแผนงาน ช่วยให้หุ่นยนต์สามารถเรียนรู้สิ่งต่อไปนี้ได้เป็นครั้งแรก:
● คำอธิบายเชิงนามธรรมของโลกภายนอก (การมองเห็น / การได้ยิน / การสัมผัส → เหตุการณ์เชิงความหมายที่มีโครงสร้าง)
● ความเข้าใจที่สอดคล้องกันของคำสั่ง (ภาษาธรรมชาติ → การวางแผนการปฏิบัติ)
● การแสดงสถานะแบบหลายรูปแบบที่สามารถแบ่งปันได้
นี่เทียบเท่ากับการเพิ่มชั้นการรับรู้ให้กับหุ่นยนต์จากพื้นฐาน ทำให้หุ่นยนต์สามารถเข้าใจ แสดงออก และเรียนรู้ได้
ด้วยเหตุนี้ หุ่นยนต์จึงไม่ได้เป็นเพียง “ตัวกระตุ้นที่แยกเดี่ยว” อีกต่อไป แต่มีอินเทอร์เฟซเชิงความหมายที่เป็นหนึ่งเดียว ทำให้สามารถผนวกรวมเข้ากับเครือข่ายความร่วมมือของเครื่องจักรขนาดใหญ่ได้
ยิ่งไปกว่านั้น ความก้าวหน้าครั้งสำคัญที่สุดของระบบปฏิบัติการสากลอยู่ที่ "ความเข้ากันได้ข้ามเครื่อง" ซึ่งทำให้หุ่นยนต์ต่างยี่ห้อและต่างรูปแบบสามารถ "สื่อสารกันด้วยภาษาเดียวกัน" ได้เป็นครั้งแรก หุ่นยนต์ต่างๆ สามารถเข้าถึงบัสข้อมูลและอินเทอร์เฟซควบคุมแบบรวมศูนย์ผ่านระบบปฏิบัติการเดียวกันได้
ที่มา: Openmind
การทำงานร่วมกันระหว่างแบรนด์ต่างๆ นี้ ทำให้ภาคอุตสาหกรรมสามารถหารือเกี่ยวกับประเด็นต่างๆ ได้อย่างแท้จริงเป็นครั้งแรก:
● การทำงานร่วมกันของหุ่นยนต์หลายตัว
● การเสนอราคาและการจัดตารางงาน
● การรับรู้ข้อมูลร่วมกัน / แผนที่ร่วมกัน
● ภารกิจร่วมข้ามอวกาศ
การทำงานร่วมกันจำเป็นต้อง "เข้าใจรูปแบบข้อมูลเดียวกัน" และระบบปฏิบัติการทั่วไปกำลังแก้ไขปัญหาพื้นฐานด้านภาษาข้อนี้อยู่
ในระบบการทำงานร่วมกันระหว่างเครื่องจักรข้ามอุปกรณ์ peaq เป็นตัวแทนของโครงสร้างพื้นฐานที่สำคัญอีกประเภทหนึ่ง นั่นคือเลเยอร์โปรโตคอลระดับต่ำที่ให้เครื่องจักรมีข้อมูลประจำตัวที่ตรวจสอบได้ แรงจูงใจทางเศรษฐกิจ และความสามารถในการประสานงานระดับเครือข่าย (9)
เนื้อหาไม่ได้กล่าวถึง "หุ่นยนต์เข้าใจโลกอย่างไร" แต่กล่าวถึง "หุ่นยนต์สามารถมีส่วนร่วมในการทำงานร่วมกันในฐานะปัจเจกบุคคลภายในเครือข่ายได้อย่างไร"
องค์ประกอบหลักในการออกแบบประกอบด้วย:
1. รหัสประจำตัวเครื่องจักร
PeaQ ให้บริการลงทะเบียนข้อมูลประจำตัวแบบกระจายศูนย์สำหรับหุ่นยนต์ อุปกรณ์ และเซ็นเซอร์ ทำให้พวกมันสามารถ:
● เข้าถึงเครือข่ายใดก็ได้ในฐานะผู้ใช้งานอิสระ
● มีส่วนร่วมในระบบการจัดสรรงานและการประเมินชื่อเสียงที่น่าเชื่อถือ
นี่เป็นเงื่อนไขเบื้องต้นที่ทำให้เครื่องสามารถกลายเป็น "โหนดเครือข่าย" ได้
2. บัญชีเศรษฐกิจอิสระ
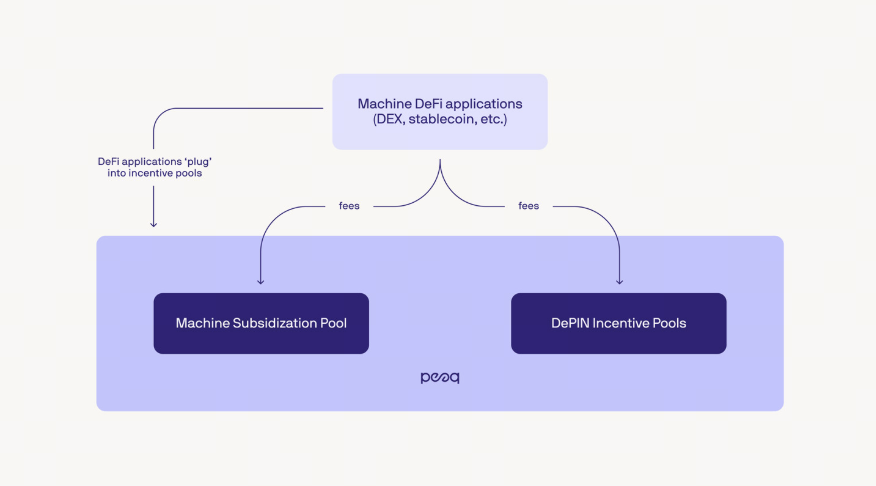
ที่มา: Peaq
หุ่นยนต์ได้รับความเป็นอิสระทางเศรษฐกิจแล้ว ด้วยระบบการชำระเงินด้วยเหรียญ Stablecoin ที่รองรับโดยตรงและตรรกะการเรียกเก็บเงินอัตโนมัติ หุ่นยนต์สามารถกระทบยอดบัญชีและชำระเงินได้โดยอัตโนมัติโดยไม่ต้องมีการแทรกแซงจากมนุษย์ ซึ่งรวมถึง:
● ค่าบริการข้อมูลจากเซ็นเซอร์จะคิดตามปริมาณ
● คิดค่าบริการตามการใช้งานจริง สำหรับพลังการประมวลผลและการอนุมานแบบจำลอง
● ชำระเงินทันทีหลังจากหุ่นยนต์ให้บริการเสร็จสิ้น (การขนถ่าย การจัดส่ง การตรวจสอบ)
● การเข้าถึงโครงสร้างพื้นฐาน เช่น จุดชาร์จแบบบริการตนเอง และพื้นที่ให้เช่า
นอกจากนี้ หุ่นยนต์ยังสามารถใช้การชำระเงินแบบมีเงื่อนไขได้:
● งานเสร็จสมบูรณ์ → ชำระเงินอัตโนมัติ
● หากผลลัพธ์ไม่เป็นไปตามเป้าหมาย → เงินทุนจะถูกระงับหรือคืนโดยอัตโนมัติ
สิ่งนี้ทำให้การทำงานร่วมกันของหุ่นยนต์มีความน่าเชื่อถือ ตรวจสอบได้ และสามารถตัดสินข้อพิพาทได้โดยอัตโนมัติ ซึ่งเป็นความสามารถที่สำคัญสำหรับการใช้งานเชิงพาณิชย์ขนาดใหญ่
นอกจากนี้ รายได้ที่หุ่นยนต์สร้างขึ้นจากการให้บริการและทรัพยากรในโลกแห่งความเป็นจริงสามารถแปลงเป็นโทเค็นและบันทึกไว้ในบล็อกเชน ทำให้มูลค่าและกระแสเงินสดปรากฏในรูปแบบที่โปร่งใส ตรวจสอบได้ ซื้อขายได้ และตั้งโปรแกรมได้ ซึ่งเป็นการสร้างวิธีการแสดงสินทรัพย์โดยมีเครื่องจักรเป็นตัวหลัก
เมื่อระบบ AI และระบบบนบล็อกเชนพัฒนาขึ้น เป้าหมายคือการทำให้เครื่องจักรสามารถหารายได้ จ่ายเงิน ให้ยืม และลงทุนได้อย่างอิสระ มีส่วนร่วมโดยตรงในการทำธุรกรรม M2M สร้างเครือข่ายเศรษฐกิจเครื่องจักรที่จัดการตนเอง และบรรลุความร่วมมือและการกำกับดูแลในรูปแบบของ DAO
3. การประสานงานภารกิจระหว่างอุปกรณ์หลายเครื่อง
ในระดับที่สูงขึ้น peaq เป็นกรอบการประสานงานระหว่างเครื่องจักร ทำให้เครื่องจักรเหล่านั้นสามารถ:
● แชร์ข้อมูลสถานะและความพร้อมใช้งาน
● มีส่วนร่วมในการเสนอราคาและการจับคู่ภารกิจ
● ดำเนินการจัดสรรทรัพยากร (กำลังประมวลผล ความคล่องตัว ความสามารถในการตรวจจับ)
สิ่งนี้ช่วยให้หุ่นยนต์สามารถทำงานร่วมกันได้เหมือนเครือข่ายของโหนด แทนที่จะทำงานอย่างโดดเดี่ยว เฉพาะเมื่อภาษาและอินเทอร์เฟซได้รับการรวมเป็นหนึ่งเดียวแล้วเท่านั้น หุ่นยนต์จึงจะสามารถเข้าสู่เครือข่ายความร่วมมือได้อย่างแท้จริง แทนที่จะคงอยู่ในระบบนิเวศปิดของตนเอง
ระบบปฏิบัติการอัจฉริยะข้ามอุปกรณ์อย่าง OpenMind พยายามสร้างมาตรฐานให้หุ่นยนต์ "เข้าใจโลกและเข้าใจคำสั่ง" ในขณะที่เครือข่ายประสานงาน Web3 อย่าง Peaq สำรวจวิธีการที่จะทำให้อุปกรณ์ต่างๆ สามารถทำงานร่วมกันได้อย่างเป็นระบบและตรวจสอบได้ภายในเครือข่ายขนาดใหญ่ นี่เป็นเพียงตัวอย่างเล็กๆ น้อยๆ จากความพยายามมากมาย ซึ่งสะท้อนให้เห็นถึงวิวัฒนาการที่รวดเร็วของอุตสาหกรรมไปสู่ชั้นการสื่อสารที่เป็นหนึ่งเดียวและระบบการทำงานร่วมกันแบบเปิด
เครือข่ายเศรษฐกิจเครื่องจักรที่สนับสนุนการมีส่วนร่วมของเครื่องจักรไร้คนขับในตลาด
หากระบบปฏิบัติการข้ามอุปกรณ์แก้ปัญหาเรื่อง "หุ่นยนต์สื่อสารกันอย่างไร" และเครือข่ายที่ประสานงานกันแก้ปัญหาเรื่อง "หุ่นยนต์ร่วมมือกันอย่างไร" แล้วสาระสำคัญของเครือข่ายเศรษฐกิจเครื่องจักรก็คือการเปลี่ยนผลิตภาพของหุ่นยนต์ให้เป็นกระแสเงินทุนที่ยั่งยืน ทำให้หุ่นยนต์สามารถจ่ายค่าใช้จ่ายในการดำเนินงานของตนเองและสร้างวงจรปิดได้
ชิ้นส่วนสำคัญที่ขาดหายไปในปริศนาที่ยาวนานของอุตสาหกรรมหุ่นยนต์คือ "ความสามารถทางเศรษฐกิจแบบอัตโนมัติ" หุ่นยนต์แบบดั้งเดิมสามารถทำตามคำสั่งที่กำหนดไว้ล่วงหน้าได้เท่านั้น แต่ไม่สามารถจัดสรรทรัพยากรภายนอก กำหนดราคาบริการ หรือชำระค่าใช้จ่ายได้ด้วยตนเอง เมื่อเข้าสู่สถานการณ์ที่ซับซ้อน พวกมันต้องพึ่งพาการบัญชี การอนุมัติ และการจัดตารางเวลาจากมนุษย์ ซึ่งขัดขวางประสิทธิภาพการทำงานร่วมกันอย่างรุนแรง และทำให้การใช้งานในวงกว้างยากยิ่งขึ้น
x402: การมอบ "สถานะหน่วยงานทางเศรษฐกิจ" ที่หุ่นยนต์สมควรได้รับ
แหล่งที่มา: X@CPPP2443_
x402 ซึ่งเป็นมาตรฐานการชำระเงินแบบ Agentic Payment รุ่นใหม่ ช่วยเติมเต็มช่องว่างพื้นฐานสำหรับบอท บอทสามารถเริ่มต้นคำขอชำระเงินโดยตรงผ่านเลเยอร์ HTTP และทำการชำระเงินแบบอะตอมิกโดยใช้เหรียญ Stablecoin ที่ตั้งโปรแกรมได้ เช่น USDC ซึ่งหมายความว่าบอทไม่เพียงแต่สามารถทำงานให้เสร็จสมบูรณ์ได้เท่านั้น แต่ยังสามารถซื้อทรัพยากรทั้งหมดที่จำเป็นสำหรับงานเหล่านั้นได้ด้วยตนเองอีกด้วย
● การจัดสรรพลังการคำนวณ (การอนุมาน LLM / การอนุมานแบบจำลองควบคุม)
● การเข้าถึงสถานที่เกิดเหตุและการเช่าอุปกรณ์
● บริการแรงงานสำหรับหุ่นยนต์ตัวอื่นๆ
เป็นครั้งแรกที่หุ่นยนต์สามารถบริโภคและผลิตได้อย่างอิสระเช่นเดียวกับหน่วยงานทางเศรษฐกิจ
ในช่วงไม่กี่ปีที่ผ่านมา มีกรณีตัวอย่างของการร่วมมือกันระหว่างผู้ผลิตหุ่นยนต์และโครงสร้างพื้นฐานการเข้ารหัส ซึ่งบ่งชี้ว่าเครือข่ายเศรษฐกิจเครื่องจักรได้เปลี่ยนจากแนวคิดไปสู่ความเป็นจริงแล้ว
OpenMind × Circle: เปิดใช้งานการรองรับการชำระเงินด้วย Stablecoin สำหรับบอทโดยตรง

ที่มา: Openmind
OpenMind ได้ผสานรวมระบบปฏิบัติการหุ่นยนต์ข้ามอุปกรณ์เข้ากับ USDC ของ Circle ทำให้หุ่นยนต์สามารถใช้เหรียญ Stablecoin โดยตรงในห่วงโซ่การดำเนินการงานเพื่อทำการชำระเงินและการชำระบัญชีให้เสร็จสมบูรณ์
นี่ถือเป็นความก้าวหน้าครั้งสำคัญสองประการ:
1. กระบวนการปฏิบัติงานของหุ่นยนต์สามารถบูรณาการเข้ากับการชำระเงินได้โดยตรง โดยไม่ต้องพึ่งพาระบบแบ็กเอนด์อีกต่อไป
2. หุ่นยนต์สามารถทำการชำระเงินแบบ "ไร้พรมแดน" ในสภาพแวดล้อมข้ามแพลตฟอร์มและข้ามแบรนด์ได้
สำหรับการทำงานร่วมกันระหว่างเครื่องจักร ความสามารถนี้ถือเป็นความสามารถพื้นฐานในการก้าวไปสู่เศรษฐกิจแบบอัตโนมัติ
Kite AI: การสร้างรากฐานบล็อกเชนแบบเนทีฟสำหรับระบบเศรษฐกิจเครื่องจักร

ที่มา: Kite AI
Kite AI พัฒนาโครงสร้างพื้นฐานของเศรษฐกิจเครื่องจักรให้ดียิ่งขึ้นไปอีก โดยได้รับการออกแบบมาโดยเฉพาะสำหรับเอเจนต์ AI ที่มีข้อมูลประจำตัวบนบล็อกเชน กระเป๋าเงินที่สามารถประกอบได้ และระบบการชำระเงินและการชำระบัญชีอัตโนมัติ ทำให้เอเจนต์สามารถดำเนินการธุรกรรมต่างๆ บนบล็อกเชนได้อย่างอิสระ (10)
ระบบนี้มอบ "สภาพแวดล้อมการดำเนินงานทางเศรษฐกิจของตัวแทนอิสระ" ที่สมบูรณ์แบบ ซึ่งเข้ากันได้ดีกับการมีส่วนร่วมในตลาดอย่างอิสระที่หุ่นยนต์ต้องการบรรลุ
1. ชั้นการระบุตัวตนของเอเจนต์/เครื่องจักร (Kite Passport) : ออกรหัสประจำตัวที่เข้ารหัสและระบบกุญแจหลายชั้นให้กับเอเจนต์ AI แต่ละตัว (ซึ่งอาจเชื่อมโยงกับหุ่นยนต์เฉพาะในอนาคตได้) สิ่งนี้ช่วยให้สามารถควบคุมได้อย่างแม่นยำว่า "ใครใช้จ่ายเงิน" และ "พวกเขาเป็นตัวแทนของใคร" และรองรับการเพิกถอนและความรับผิดชอบได้ตลอดเวลา นี่คือหลักการพื้นฐานในการปฏิบัติต่อเอเจนต์ในฐานะผู้เล่นทางเศรษฐกิจอิสระ
2. รองรับ Stablecoin ดั้งเดิม + ฟังก์ชัน x402 ในตัว : Kite ผสานรวมมาตรฐานการชำระเงิน x402 ในระดับบล็อกเชน โดยใช้ Stablecoin เช่น USDC เป็นสินทรัพย์เริ่มต้นในการชำระเงิน ซึ่งช่วยให้เอเจนต์สามารถส่ง รับ และกระทบยอดธุรกรรมได้ผ่านการอนุมัติตามเจตนาที่เป็นมาตรฐาน นอกจากนี้ยังมีการปรับปรุงประสิทธิภาพพื้นฐานสำหรับสถานการณ์การชำระเงินที่มีความถี่สูง จำนวนเงินน้อย และระหว่างเครื่อง (การยืนยันภายในเวลาไม่ถึงวินาที ค่าธรรมเนียมต่ำ และตรวจสอบได้)
3. ข้อจำกัดและการกำกับดูแลที่ตั้งโปรแกรมได้ : ด้วยนโยบายบนบล็อกเชน สามารถกำหนดวงเงินการใช้จ่าย รายชื่อร้านค้า/สัญญาที่ได้รับอนุญาต กฎการควบคุมความเสี่ยง และบันทึกการตรวจสอบสำหรับเอเจนต์ได้ เพื่อให้ "การเปิดกระเป๋าเงินสำหรับเครื่องจักร" สามารถสร้างสมดุลระหว่างความปลอดภัยและความเป็นอิสระได้
กล่าวอีกนัยหนึ่ง หากระบบปฏิบัติการของ OpenMind ช่วยให้หุ่นยนต์ "เข้าใจโลกและทำงานร่วมกันได้" โครงสร้างพื้นฐานบล็อกเชนของ Kite AI ก็ช่วยให้หุ่นยนต์ "อยู่รอดได้ภายในระบบเศรษฐกิจ"
ด้วยเทคโนโลยีข้างต้น เครือข่ายเศรษฐกิจเครื่องจักรสร้าง "แรงจูงใจในการทำงานร่วมกัน" และ "วงจรปิดคุณค่า" ซึ่งช่วยให้หุ่นยนต์ไม่เพียงแต่ "จ่ายเงิน" ได้เท่านั้น แต่ที่สำคัญกว่านั้นคือ ช่วยให้พวกมันสามารถทำสิ่งต่อไปนี้ได้:
● รายได้ตามผลงาน (การชำระเงินตามผลลัพธ์)
● จัดซื้อทรัพยากรตามความต้องการ (โครงสร้างต้นทุนแบบอัตโนมัติ)
● เข้าร่วมการแข่งขันในตลาดโดยอิงจากชื่อเสียงบนบล็อกเชน (ประสิทธิภาพที่ตรวจสอบได้)
นี่หมายความว่าหุ่นยนต์สามารถมีส่วนร่วมในระบบแรงจูงใจทางเศรษฐกิจได้อย่างสมบูรณ์เป็นครั้งแรก กล่าวคือ พวกมันสามารถทำงาน → หารายได้ → ใช้จ่ายเงิน → และปรับพฤติกรรมของตนเองได้อย่างอิสระ
สรุป
ลุค
เมื่อพิจารณาจากสามทิศทางหลักที่กล่าวมาข้างต้น บทบาทของ Web3 ในอุตสาหกรรมหุ่นยนต์จึงค่อยๆ ชัดเจนขึ้น:
● ชั้นข้อมูล : มอบพลังในการรวบรวมข้อมูลขนาดใหญ่จากหลายแหล่ง และปรับปรุงความครอบคลุมของสถานการณ์ที่มีความผันผวนสูง
● เลเยอร์การทำงานร่วมกัน : นำเสนอระบบระบุตัวตนที่เป็นหนึ่งเดียว กลไกการทำงานร่วมกัน และการกำกับดูแลงานสำหรับการทำงานร่วมกันข้ามอุปกรณ์
● ชั้นเศรษฐกิจ : จัดเตรียมกรอบการทำงานที่สามารถตั้งโปรแกรมได้สำหรับพฤติกรรมทางเศรษฐกิจของหุ่นยนต์ผ่านการชำระเงินบนบล็อกเชนและการชำระบัญชีที่ตรวจสอบได้
ความสามารถเหล่านี้โดยรวมแล้วเป็นการวางรากฐานสำหรับอินเทอร์เน็ตของเครื่องจักรในอนาคต ซึ่งจะช่วยให้หุ่นยนต์สามารถทำงานร่วมกันและปฏิบัติงานในสภาพแวดล้อมทางเทคโนโลยีที่เปิดกว้างและตรวจสอบได้มากขึ้น
ความไม่แน่นอน
แม้ว่าระบบนิเวศหุ่นยนต์จะก้าวหน้าอย่างที่ไม่เคยมีมาก่อนในปี 2025 แต่การเปลี่ยนผ่านจาก "เป็นไปได้ทางเทคนิค" ไปสู่ "ขยายขนาดได้และยั่งยืน" ยังคงเต็มไปด้วยความไม่แน่นอน ความไม่แน่นอนเหล่านี้ไม่ได้เกิดจากปัญหาคอขวดทางเทคโนโลยีเพียงอย่างเดียว แต่เกิดจากการผสมผสานที่ซับซ้อนของปัจจัยด้านวิศวกรรม เศรษฐกิจ ตลาด และสถาบัน
ความเป็นไปได้ทางเศรษฐกิจนั้นถูกต้องแม่นยำจริงหรือไม่?
แม้ว่าจะมีความก้าวหน้าในการรับรู้ การควบคุม และความฉลาด แต่การนำหุ่นยนต์มาใช้งานในวงกว้างนั้นขึ้นอยู่กับว่าความต้องการทางธุรกิจและผลตอบแทนทางเศรษฐกิจที่แท้จริงจะเกิดขึ้นหรือไม่ ปัจจุบัน หุ่นยนต์ฮิวมานอยด์และหุ่นยนต์อเนกประสงค์ส่วนใหญ่ยังคงอยู่ในขั้นตอนการทดลองและตรวจสอบความถูกต้อง ยังขาดข้อมูลระยะยาวที่เพียงพอว่าบริษัทต่างๆ เต็มใจที่จะจ่ายค่าบริการหุ่นยนต์ในระยะยาวหรือไม่ และโมเดล OaaS/RaaS จะสามารถสร้างผลตอบแทนจากการลงทุน (ROI) ที่สูงอย่างสม่ำเสมอในอุตสาหกรรมต่างๆ ได้หรือไม่
ในขณะเดียวกัน ข้อได้เปรียบด้านความคุ้มค่าของหุ่นยนต์ในสภาพแวดล้อมที่ซับซ้อนและไม่มีโครงสร้างที่ชัดเจนยังไม่ได้รับการพิสูจน์อย่างเต็มที่ ในหลายสถานการณ์ ระบบอัตโนมัติแบบดั้งเดิมหรือการใช้แรงงานมนุษย์ยังคงมีราคาถูกกว่าและน่าเชื่อถือกว่า ซึ่งหมายความว่า ความเป็นไปได้ทางเทคโนโลยีไม่ได้หมายความว่าจะมีความจำเป็นทางเศรษฐกิจเสมอไป และความไม่แน่นอนของอัตราการนำไปใช้ในเชิงพาณิชย์จะส่งผลกระทบโดยตรงต่อความเร็วในการขยายตัวของอุตสาหกรรมโดยรวม
ความท้าทายเชิงระบบต่อความน่าเชื่อถือทางวิศวกรรมและความซับซ้อนในการดำเนินงาน
ความท้าทายที่แท้จริงที่ใหญ่ที่สุดที่อุตสาหกรรมหุ่นยนต์เผชิญอยู่ มักไม่ใช่ว่าหุ่นยนต์จะ "ทำงานให้สำเร็จ" ได้หรือไม่ แต่เป็นว่าหุ่นยนต์จะสามารถทำงานได้อย่างเสถียรและคุ้มค่าในระยะยาวหรือไม่ ในการใช้งานขนาดใหญ่ อัตราความล้มเหลวของฮาร์ดแวร์ ค่าใช้จ่ายในการบำรุงรักษา การอัปเกรดซอฟต์แวร์ การจัดการพลังงาน และปัญหาด้านความปลอดภัยและความรับผิดชอบ ล้วนสามารถขยายตัวอย่างรวดเร็วกลายเป็นความเสี่ยงเชิงระบบได้
แม้ว่าโมเดล OaaS จะช่วยลดค่าใช้จ่ายด้านเงินทุนเริ่มต้นลงได้ แต่ต้นทุนแฝงในด้านการดำเนินงาน ประกันภัย ความรับผิด และการปฏิบัติตามกฎระเบียบ ก็ยังคงสามารถบั่นทอนโมเดลธุรกิจโดยรวมได้ หากความน่าเชื่อถือไม่สามารถตอบสนองความต้องการขั้นต่ำสำหรับการใช้งานเชิงพาณิชย์ได้ วิสัยทัศน์ของเครือข่ายหุ่นยนต์และเศรษฐกิจเครื่องจักรก็จะยากที่จะเกิดขึ้นจริง
ความร่วมมือเชิงนิเวศวิทยา การบรรจบกันของมาตรฐาน และการปรับตัวของสถาบัน
ระบบนิเวศของหุ่นยนต์กำลังพัฒนาอย่างรวดเร็วพร้อมกันในแง่ของระบบปฏิบัติการ เฟรมเวิร์กของเอเจนต์ โปรโตคอลบล็อกเชน และมาตรฐานการชำระเงิน แต่ยังคงกระจัดกระจายอย่างมาก การทำงานร่วมกันข้ามอุปกรณ์ ข้ามผู้ผลิต และข้ามระบบมีต้นทุนสูง และมาตรฐานสากลยังไม่บรรจบกันอย่างสมบูรณ์ ซึ่งอาจนำไปสู่การกระจัดกระจายของระบบนิเวศ การพัฒนาที่ซ้ำซ้อน และการสูญเสียประสิทธิภาพ
ในขณะเดียวกัน หุ่นยนต์ที่มีความสามารถในการตัดสินใจและบริหารจัดการเศรษฐกิจด้วยตนเองกำลังท้าทายกรอบกฎระเบียบและกฎหมายที่มีอยู่เดิม การกำหนดความรับผิดชอบ การปฏิบัติตามกฎระเบียบการชำระเงิน และขอบเขตด้านข้อมูลและความปลอดภัยยังคงไม่ชัดเจน หากกฎระเบียบและมาตรฐานไม่สามารถตามทันวิวัฒนาการทางเทคโนโลยี เครือข่ายเศรษฐกิจที่ใช้เครื่องจักรจะเผชิญกับความไม่แน่นอนในแง่ของการปฏิบัติตามกฎระเบียบและการนำไปปฏิบัติ
โดยรวมแล้ว เงื่อนไขสำหรับการประยุกต์ใช้หุ่นยนต์ในวงกว้างกำลังค่อยๆ ก่อตัวขึ้น และพื้นฐานของระบบเศรษฐกิจเครื่องจักรก็เริ่มปรากฏให้เห็นในทางปฏิบัติทางอุตสาหกรรม แม้ว่า Web3 × Robotics จะยังอยู่ในช่วงเริ่มต้น แต่ก็แสดงให้เห็นถึงศักยภาพในการพัฒนาในระยะยาวที่น่าจับตามองแล้ว
เอกสารอ้างอิง
1. https://www.morganstanley.com/insights/articles/humanoid-robot-market-5-trillion-by-2050
5. http://www.xinhuanet.com/tech/20250908/89cc1111e729403ca5af4a397ebd01ce/c.html
7. https://orbilu.uni.lu/bitstream/10993/39438/1/comst-preprint.pdf


