
Sự trỗi dậy của nền kinh tế máy móc: Web3 đang thúc đẩy robot từ công cụ trở thành hệ thống tự động như thế nào?
- 核心观点:机器人产业正迈向“物理+智能+金融+组织”的系统性重塑。
- 关键要素:
- 技术成熟:AI、仿真、硬件多技术收敛,实现规模化部署。
- 资本涌入:巨额融资验证产业拐点与商业化路径。
- 经济赋能:Web3提供支付、身份与协作框架,支撑机器自主经济。
- 市场影响:催生新商业模式与协作网络,重塑价值捕获方式。
- 时效性标注:长期影响
Giới thiệu
Trong những năm gần đây, ngành công nghiệp robot đã chứng kiến một bước ngoặt kép cả về công nghệ và mô hình kinh doanh. Trước đây, robot chủ yếu được xem là "công cụ", phụ thuộc vào việc lập lịch trình từ phía các công ty, không thể tự động hợp tác và thiếu khả năng kinh tế. Tuy nhiên, với sự tích hợp của các công nghệ mới như AI Agents, thanh toán trên chuỗi (x402) và nền kinh tế máy móc, hệ sinh thái robot đang phát triển từ một cuộc cạnh tranh phần cứng đơn chiều thành một hệ thống đa tầng, phức tạp bao gồm "thân thể - trí tuệ - thanh toán - tổ chức".
Đáng chú ý hơn nữa là thị trường vốn toàn cầu đang nhanh chóng định giá xu hướng này. Morgan Stanley dự đoán rằng thị trường robot hình người có thể đạt 5 nghìn tỷ đô la vào năm 2050, thúc đẩy hơn nữa sự tăng trưởng trong các ngành liên quan như chuỗi cung ứng, vận hành và bảo trì, và dịch vụ. Trong cùng năm đó, số lượng robot hình người đang được sử dụng dự kiến sẽ vượt quá 1 tỷ. Điều này có nghĩa là robot sẽ thực sự chuyển từ thiết bị công nghiệp sang "những người tham gia xã hội quy mô lớn". (1)
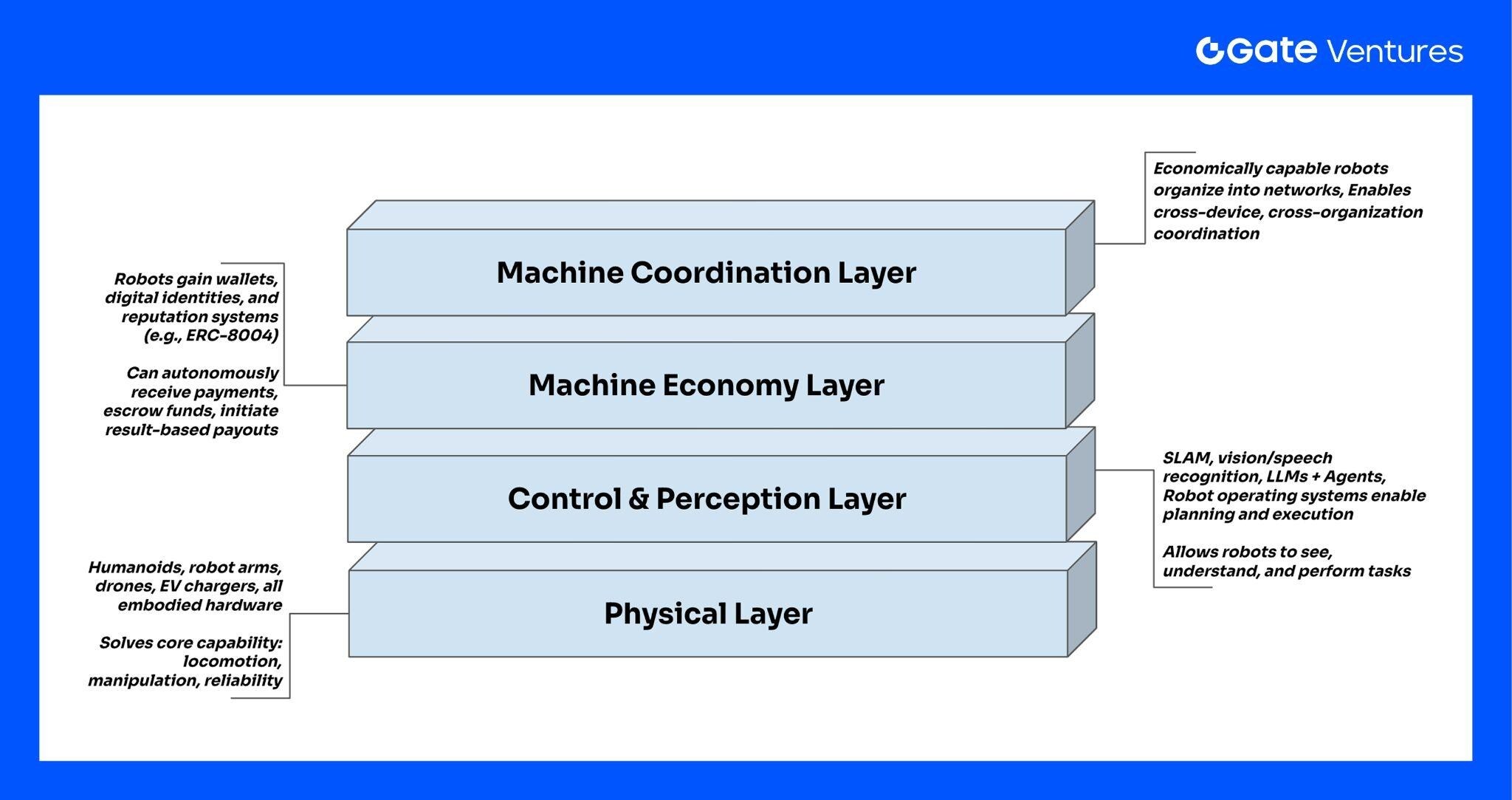
Để hiểu được hướng phát triển tương lai của ngành công nghiệp robot, chúng ta có thể xem toàn bộ hệ sinh thái như một cấu trúc bốn lớp:
Nguồn: Gate Ventures
Lớp đầu tiên là Lớp Vật lý: lớp này bao gồm tất cả các phương tiện vận chuyển hữu hình như robot, cánh tay robot, máy bay không người lái và trạm sạc xe điện. Chúng giải quyết các khả năng di chuyển và vận hành cơ bản, chẳng hạn như đi bộ, cầm nắm, độ tin cậy cơ học và chi phí. Tuy nhiên, các máy móc ở lớp này vẫn thiếu "năng lực kinh tế", nghĩa là chúng không thể tự động thực hiện các hành động như sạc pin, thanh toán hoặc mua dịch vụ.
Lớp thứ hai là Lớp Điều khiển & Nhận thức: Lớp này bao gồm các công nghệ điều khiển học robot truyền thống, SLAM, hệ thống nhận thức, nhận dạng giọng nói và hình ảnh, cho đến LLM+Agent hiện nay, và ngày càng nhiều hệ điều hành robot có khả năng lập kế hoạch trừu tượng (như ROS và OpenMind OS). Lớp này cho phép máy móc "hiểu, nhìn và thực hiện các nhiệm vụ", nhưng các hoạt động kinh tế như thanh toán, hợp đồng và xác minh danh tính vẫn cần sự can thiệp của con người ở hậu trường.
Lớp thứ ba là Lớp Kinh tế Máy móc: sự chuyển đổi thực sự bắt đầu từ đây. Máy móc bắt đầu sở hữu ví điện tử, danh tính kỹ thuật số và hệ thống đánh giá uy tín (như ERC-8004), và trực tiếp thanh toán cho sức mạnh tính toán, dữ liệu, năng lượng và quyền ưu tiên thông qua các cơ chế như x402, thanh toán trên chuỗi và các lệnh gọi lại trên chuỗi; chúng cũng có thể tự động thu thập các khoản thanh toán, quản lý quỹ và khởi tạo các khoản thanh toán dựa trên kết quả thực hiện nhiệm vụ. Lớp này biến robot từ "tài sản của doanh nghiệp" thành "tác nhân kinh tế", cho phép chúng tham gia vào thị trường.
Lớp thứ tư là Lớp Điều phối Máy móc: Khi một số lượng lớn robot sở hữu khả năng thanh toán và nhận dạng tự động, chúng có thể được tổ chức thành các đội và mạng lưới—đàn máy bay không người lái, mạng lưới robot dọn dẹp, mạng lưới năng lượng xe điện, v.v. Chúng có thể tự động điều chỉnh giá cả, lên lịch ca làm việc, đấu thầu nhiệm vụ, chia sẻ doanh thu và thậm chí hình thành các thực thể kinh tế tự chủ dưới dạng DAO.
Thông qua cấu trúc bốn lớp nêu trên, ta có thể thấy rằng:
Hệ sinh thái robot trong tương lai sẽ không chỉ là một cuộc cách mạng về phần cứng, mà là sự định hình lại mang tính hệ thống về "vật lý + trí tuệ + tài chính + tổ chức".
Điều này không chỉ định nghĩa lại ranh giới khả năng của máy móc mà còn định nghĩa lại cách thức tạo ra giá trị. Cho dù đó là các công ty robot, nhà phát triển trí tuệ nhân tạo, nhà cung cấp cơ sở hạ tầng hay các giao thức thanh toán và định danh dựa trên tiền điện tử, tất cả đều sẽ tìm được chỗ đứng của mình trong nền kinh tế robot mới.
Tại sao ngành công nghiệp robot lại bùng nổ vào thời điểm hiện tại?
Trong nhiều thập kỷ, ngành công nghiệp robot vẫn chỉ tồn tại trong các phòng thí nghiệm, gian hàng triển lãm và các kịch bản công nghiệp cụ thể, luôn chỉ cách một bước nữa là đến giai đoạn thương mại hóa quy mô lớn và ứng dụng xã hội thực sự. Tuy nhiên, sau năm 2025, bước này bắt đầu được vượt qua. Cho dù từ góc độ thị trường vốn, sự trưởng thành về công nghệ, hay đánh giá của các nhà quan sát ngành như CEO của Nvidia, Jensen Huang, tất cả đều đang phát đi cùng một tín hiệu:
“Thời điểm bùng nổ của ChatGPT đối với lĩnh vực robot nói chung sắp đến rồi.”
Nhận định này không phải là phóng đại, mà dựa trên ba tín hiệu quan trọng của ngành:
1. Khả năng tính toán, lập mô hình, mô phỏng, nhận thức và điều khiển, cùng các khả năng cơ bản khác đều đang phát triển đồng thời.
2. Trí tuệ robot phát triển từ điều khiển khép kín sang ra quyết định mở dựa trên LLM/Agent.
3. Bước nhảy vọt từ khả năng độc lập sang khả năng hệ thống: Robot sẽ chuyển đổi từ trạng thái "hoạt động chủ động" sang trạng thái "hợp tác, dựa trên khả năng hiểu biết và hiệu quả về mặt kinh tế".
Huang Renxun thậm chí còn đi xa hơn và dự đoán rằng robot hình người sẽ được sử dụng rộng rãi trong 5 năm tới, một quan điểm rất phù hợp với hành vi của thị trường vốn và việc triển khai công nghiệp vào năm 2025.
Từ góc độ vốn đầu tư: Việc huy động vốn khổng lồ chứng tỏ rằng "bước ngoặt về robot" đã được thị trường phản ánh vào giá cả.
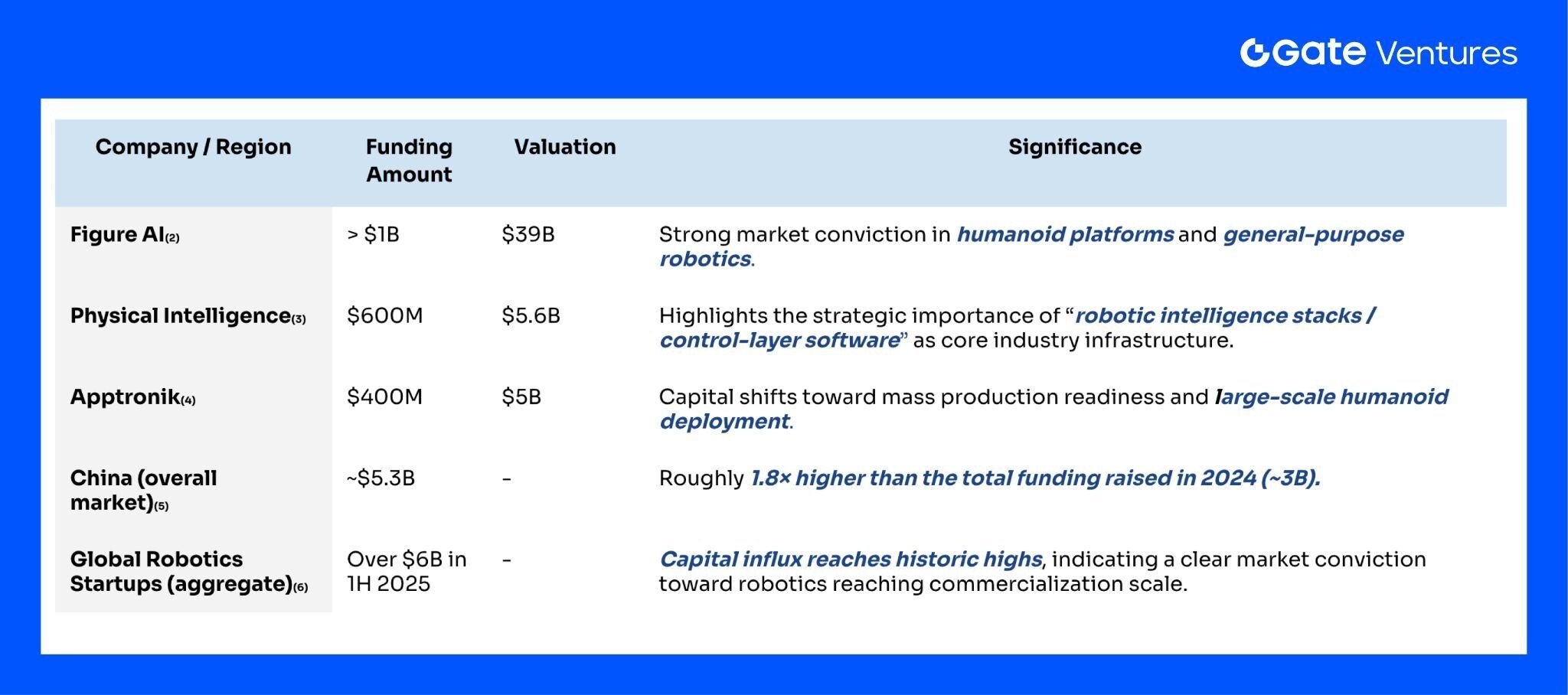
Trong giai đoạn 2024-2025, ngành công nghiệp robot chứng kiến mật độ và quy mô tài trợ chưa từng có, với nhiều vòng gọi vốn vượt quá 500 triệu đô la chỉ riêng trong năm 2025. Một số ví dụ điển hình bao gồm:
Nguồn: Gate Ventures
Vốn đầu tư đã khẳng định rằng ngành công nghiệp robot đã đạt đến giai đoạn mà việc đầu tư có thể được chứng minh là hiệu quả.
Các khoản tài trợ này có những đặc điểm chung sau:
● Đây không phải là "tài trợ ý tưởng", mà tập trung vào dây chuyền sản xuất, chuỗi cung ứng, thông tin tổng quát và triển khai thương mại.
● Không phải là các dự án riêng lẻ, mà là một hệ thống toàn diện tích hợp phần cứng và phần mềm, kiến trúc full-stack và dịch vụ trọn vòng đời cho robot.
Việc đầu tư hàng tỷ đô la không phải là ngẫu nhiên; nó phản ánh sự khẳng định về sự trưởng thành của ngành.
Khía cạnh kỹ thuật: Những bước đột phá mang tính quyết định xảy ra đồng thời.
Ngành công nghiệp robot đã chứng kiến sự hội tụ chưa từng có của nhiều công nghệ trong năm 2025. Thứ nhất, những đột phá trong các tác nhân AI và mô hình ngôn ngữ quy mô lớn đã biến robot từ những "cỗ máy có thể vận hành" đơn thuần có khả năng thực thi các lệnh thành "các tác nhân thông minh có thể hiểu được", có khả năng hiểu ngôn ngữ, phân tích nhiệm vụ và suy luận bằng cả thị giác và xúc giác. Thứ hai, nhận thức đa phương thức và các mô hình điều khiển thế hệ tiếp theo (như RT-X và Chính sách khuếch tán) đã lần đầu tiên mang lại cho robot những khả năng cơ bản tiếp cận trí tuệ tổng quát.
Nguồn: Nvidia
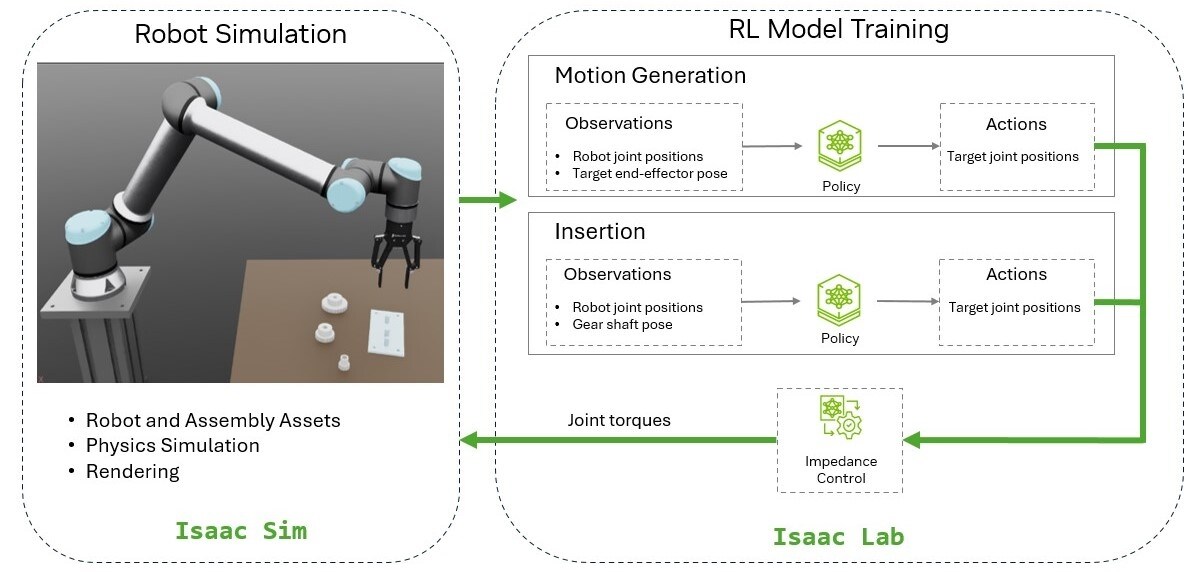
Đồng thời, công nghệ mô phỏng và chuyển giao đang phát triển nhanh chóng. Môi trường mô phỏng độ chính xác cao như Isaac và Rosie thu hẹp đáng kể khoảng cách giữa mô phỏng và thực tế, cho phép robot hoàn thành quá trình huấn luyện quy mô lớn trong môi trường ảo với chi phí cực thấp và chuyển giao kiến thức đã học một cách đáng tin cậy sang thế giới thực. Điều này giải quyết được những nút thắt cơ bản như tốc độ học chậm của robot, chi phí thu thập dữ liệu cao và rủi ro cao trong môi trường thực tế.
Sự phát triển của phần cứng cũng vô cùng quan trọng. Các linh kiện cốt lõi như động cơ mô-men xoắn, mô-đun khớp nối và cảm biến đã liên tục giảm chi phí nhờ việc mở rộng quy mô chuỗi cung ứng, và sự trỗi dậy nhanh chóng của Trung Quốc trong chuỗi cung ứng robot toàn cầu đã进一步 nâng cao năng suất ngành công nghiệp. Với việc nhiều công ty triển khai kế hoạch sản xuất hàng loạt, robot lần đầu tiên có được nền tảng công nghiệp "có thể sao chép và mở rộng quy mô".
Cuối cùng, những cải tiến về độ tin cậy và hiệu quả năng lượng cho phép robot thực sự đáp ứng các yêu cầu tối thiểu cho các ứng dụng thương mại. Khả năng điều khiển động cơ tốt hơn, hệ thống an toàn dự phòng và hệ điều hành thời gian thực cho phép robot hoạt động ổn định trong thời gian dài trong môi trường doanh nghiệp.
Những yếu tố này đã cho phép ngành công nghiệp robot, lần đầu tiên, sở hữu đầy đủ các điều kiện cần thiết để chuyển từ "giai đoạn trình diễn trong phòng thí nghiệm" sang "triển khai quy mô lớn trong thế giới thực". Đây là lý do cơ bản tại sao ngành công nghiệp robot đang bùng nổ hiện nay.
Thương mại hóa: Từ nguyên mẫu đến sản xuất hàng loạt và triển khai thực tế.
Năm 2025 cũng đánh dấu sự xuất hiện rõ ràng đầu tiên của lộ trình thương mại hóa robot. Các công ty hàng đầu như Apptronik, Figure và Tesla Optimus lần lượt công bố kế hoạch sản xuất hàng loạt, cho thấy robot hình người đã chuyển từ giai đoạn nguyên mẫu sang giai đoạn công nghiệp hóa có thể nhân rộng. Đồng thời, nhiều công ty bắt đầu triển khai thí điểm trong các kịch bản có nhu cầu cao như kho bãi và hậu cần, tự động hóa nhà máy, để kiểm chứng hiệu quả và độ tin cậy của robot trong môi trường thực tế.
Với sự cải thiện khả năng sản xuất hàng loạt phần cứng, mô hình "Vận hành như một dịch vụ (OaaS)" đã bắt đầu được thị trường chứng thực. Các doanh nghiệp không cần phải trả chi phí mua ban đầu cao; thay vào đó, họ đăng ký dịch vụ robot hàng tháng, từ đó cải thiện đáng kể lợi tức đầu tư (ROI). Mô hình này đã trở thành một đổi mới kinh doanh quan trọng thúc đẩy việc ứng dụng robot trên quy mô lớn.
Hơn nữa, ngành công nghiệp đang nhanh chóng lấp đầy những khoảng trống trong các hệ thống dịch vụ còn thiếu trước đây, bao gồm cơ sở hạ tầng như mạng lưới sửa chữa, cung cấp phụ tùng thay thế và các nền tảng giám sát và bảo trì từ xa. Với những khả năng này, robot đang bắt đầu đáp ứng đầy đủ các điều kiện cần thiết cho hoạt động liên tục và mô hình kinh doanh khép kín.
Nhìn chung, năm 2025 là một năm cột mốc đối với robot, đánh dấu sự chuyển đổi từ câu hỏi "liệu chúng có thể được chế tạo hay không" sang "liệu chúng có thể được bán, sử dụng và có giá cả phải chăng hay không", với lộ trình thương mại hóa lần đầu tiên cho thấy một chu kỳ tích cực bền vững.
Hệ sinh thái Web3 X Robot
Với sự bùng nổ mạnh mẽ của ngành công nghiệp robot dự kiến vào năm 2025, công nghệ blockchain cũng đã tìm được vị trí rõ ràng trong lĩnh vực này, bổ sung cho hệ thống robot một số khả năng quan trọng. Giá trị cốt lõi của nó có thể được tóm tắt trong ba hướng chính: i) thu thập dữ liệu cho công nghệ robot, ii) mạng lưới phối hợp máy móc giữa các thiết bị, và iii) mạng lưới kinh tế máy móc hỗ trợ sự tham gia của máy móc tự động vào thị trường.
Sự phân quyền kết hợp với các ưu đãi bằng token cung cấp một nguồn dữ liệu mới cho việc huấn luyện robot, nhưng chất lượng dữ liệu vẫn phụ thuộc vào công cụ xử lý dữ liệu phía máy chủ để được cải thiện.
Điểm nghẽn cốt lõi trong việc huấn luyện các mô hình Trí tuệ nhân tạo vật lý nằm ở quy mô dữ liệu thực tế, phạm vi bao phủ bối cảnh và sự khan hiếm dữ liệu tương tác vật lý chất lượng cao. Sự xuất hiện của DePIN/DePAI cho phép Web3 cung cấp các giải pháp mới cho câu hỏi "ai đóng góp dữ liệu và làm thế nào để đóng góp một cách bền vững".
Tuy nhiên, từ góc độ nghiên cứu học thuật, mặc dù dữ liệu phi tập trung có tiềm năng về quy mô và phạm vi bao phủ, nhưng nó không nhất thiết tương đương với dữ liệu huấn luyện chất lượng cao. Nó vẫn cần được sàng lọc, làm sạch và kiểm soát sai lệch bởi một công cụ xử lý dữ liệu phía sau trước khi có thể thực sự được sử dụng để huấn luyện các mô hình lớn.
Thứ nhất, Web3 giải quyết vấn đề "động lực cung cấp dữ liệu" thay vì trực tiếp đảm bảo "chất lượng dữ liệu".
Dữ liệu huấn luyện robot truyền thống chủ yếu đến từ các phòng thí nghiệm, các đội xe nhỏ hoặc bộ sưu tập nội bộ của doanh nghiệp, điều này là không đủ trên quy mô cấp số nhân.
Mô hình DePIN/DePAI của Web3 sử dụng các ưu đãi bằng token để cho phép người dùng thông thường, nhà điều hành thiết bị hoặc nhà điều hành từ xa trở thành người đóng góp dữ liệu, làm tăng đáng kể quy mô và sự đa dạng của các nguồn dữ liệu.
Dự án bao gồm:
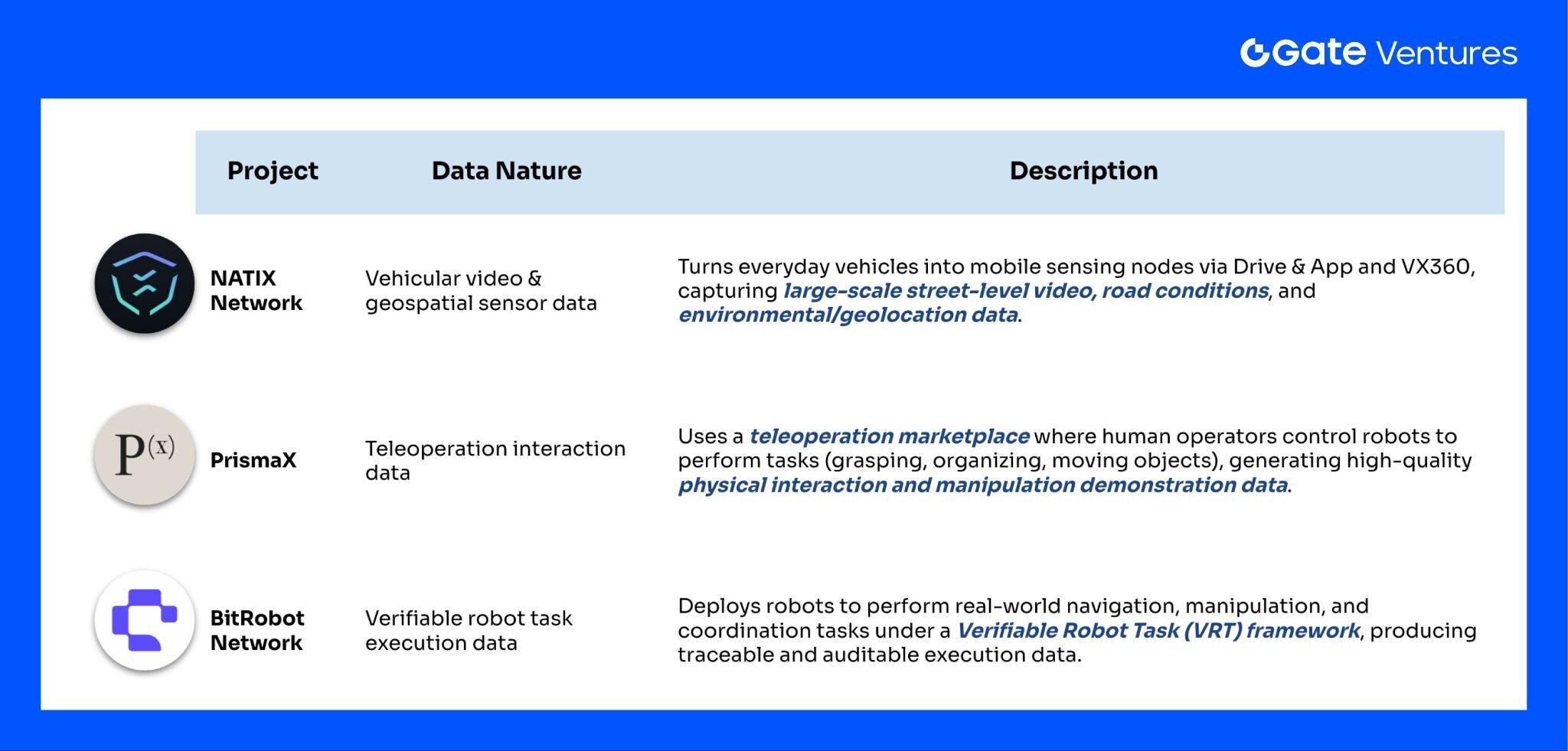
Nguồn: Gate Ventures
● Mạng lưới NATIX: Biến các xe Volkswagen thành các nút dữ liệu di động thông qua Drive & App và VX360, thu thập dữ liệu video, vị trí địa lý và môi trường.
● PrismaX: Thu thập dữ liệu tương tác vật lý chất lượng cao của robot (cầm nắm, phân loại và di chuyển vật phẩm) thông qua điều khiển thị trường từ xa.
● Mạng BitRobot: Cho phép các nút robot thực hiện các nhiệm vụ có thể kiểm chứng (VRT), tạo ra dữ liệu về hoạt động thực tế, điều hướng và hành vi hợp tác.
Những dự án này chứng minh rằng Web3 có thể mở rộng hiệu quả nguồn cung cấp dữ liệu, bổ sung cho các tình huống thực tế và các trường hợp hiếm gặp mà các hệ thống truyền thống khó có thể đáp ứng.
Tuy nhiên, theo các nghiên cứu học thuật, dữ liệu thu thập từ cộng đồng/phi tập trung thường gặp phải các vấn đề về cấu trúc như "độ chính xác không đủ, nhiễu cao và sai lệch lớn". Nghiên cứu học thuật sâu rộng về crowdsourcing và mobile crowdsensing chỉ ra rằng:
1. Chất lượng dữ liệu biến động mạnh, với nhiều nhiễu và sự khác biệt về định dạng.
Sự khác biệt về thiết bị, phương pháp vận hành và hiểu biết của các bên liên quan có thể dẫn đến lượng lớn dữ liệu không nhất quán, cần được phát hiện và sàng lọc.
2. Thiên kiến cấu trúc rất phổ biến.
Những người tham gia thường tập trung ở các khu vực/nhóm cụ thể, dẫn đến sự khác biệt giữa phân bố mẫu và phân bố thực tế.
3. Dữ liệu thô thu thập từ cộng đồng không thể được sử dụng trực tiếp để huấn luyện mô hình.
Nghiên cứu về lái xe tự động, trí tuệ nhân tạo thể hiện và robot nhấn mạnh rộng rãi rằng các bộ dữ liệu huấn luyện chất lượng cao cần một quy trình hoàn chỉnh: thu thập → xem xét chất lượng → căn chỉnh dư thừa → tăng cường dữ liệu → hoàn thiện phần đuôi dài → sửa lỗi nhất quán nhãn, thay vì "thu thập và sử dụng ngay lập tức". (7)
Do đó, mạng dữ liệu của Web3 cung cấp nhiều nguồn dữ liệu hơn, nhưng liệu chúng có thể được sử dụng trực tiếp làm dữ liệu huấn luyện hay không lại phụ thuộc vào kỹ thuật xử lý dữ liệu ở phía máy chủ.
Giá trị thực sự của DePIN nằm ở việc cung cấp nền tảng dữ liệu "liên tục, có khả năng mở rộng và chi phí thấp hơn" cho Trí tuệ nhân tạo vật lý (Physical AI).
Thay vì nói rằng Web3 đã giải quyết ngay lập tức vấn đề độ chính xác dữ liệu, chính xác hơn là nó đã giải quyết:
● "Ai sẵn lòng đóng góp dữ liệu lâu dài?"
● Làm thế nào để khuyến khích nhiều thiết bị thực kết nối hơn?
● Làm thế nào chúng ta có thể chuyển đổi mô hình thu thập dữ liệu từ tập trung sang mạng lưới mở bền vững?
Nói cách khác, DePIN/DePAI cung cấp nền tảng cho quy mô và phạm vi dữ liệu, biến Web3 trở thành một phần quan trọng trong "lớp nguồn dữ liệu" của kỷ nguyên Trí tuệ nhân tạo vật lý, nhưng không phải là yếu tố duy nhất đảm bảo chất lượng dữ liệu.
Mạng phối hợp máy móc đa thiết bị: Một hệ điều hành đa năng cung cấp lớp giao tiếp cơ bản cho sự hợp tác giữa các robot.
Ngành công nghiệp robot hiện đang chuyển đổi từ trí tuệ độc lập sang hợp tác nhóm, nhưng một nút thắt quan trọng vẫn tồn tại: robot của các thương hiệu, hình dạng và công nghệ khác nhau không thể chia sẻ thông tin, tương tác với nhau hoặc sử dụng một phương tiện truyền thông thống nhất. Điều này buộc sự hợp tác giữa nhiều robot phải dựa vào các hệ thống khép kín do nhà sản xuất xây dựng, hạn chế nghiêm trọng việc triển khai trên quy mô lớn.
Trong những năm gần đây, sự xuất hiện của các lớp hệ điều hành robot đa năng (lớp ROS), được đại diện bởi OpenMind, đã cung cấp một giải pháp mới cho vấn đề này. Các hệ thống này không phải là "phần mềm điều khiển" theo nghĩa truyền thống, mà là các hệ điều hành thông minh xuyên suốt cơ thể robot. Giống như Android trong ngành công nghiệp điện thoại di động, chúng cung cấp một ngôn ngữ chung và cơ sở hạ tầng chung cho giao tiếp, nhận thức, hiểu biết và hợp tác giữa các robot. (8)
Trong các kiến trúc truyền thống, các cảm biến, bộ điều khiển và mô-đun suy luận bên trong mỗi robot được tách biệt, khiến việc chia sẻ thông tin ngữ nghĩa giữa các thiết bị trở nên bất khả thi. Tuy nhiên, một lớp hệ điều hành đa năng, thông qua giao diện nhận thức thống nhất, định dạng ra quyết định và phương pháp lập kế hoạch nhiệm vụ, cho phép robot thu thập được, lần đầu tiên:
● Mô tả trừu tượng về thế giới bên ngoài (thị giác / thính giác / xúc giác → các sự kiện ngữ nghĩa có cấu trúc)
● Hiểu biết thống nhất về các chỉ dẫn (ngôn ngữ tự nhiên → lập kế hoạch hành động)
● Biểu diễn trạng thái đa phương thức có thể chia sẻ
Điều này tương đương với việc bổ sung một lớp nhận thức cho robot ngay từ nền tảng cơ bản, giúp nó có khả năng hiểu, thể hiện và học hỏi.
Do đó, robot không còn là "các thiết bị chấp hành riêng lẻ" mà có giao diện ngữ nghĩa thống nhất, cho phép chúng được tích hợp vào các mạng lưới cộng tác máy móc quy mô lớn hơn.
Hơn nữa, bước đột phá lớn nhất của hệ điều hành phổ quát nằm ở "khả năng tương thích giữa các máy móc", cho phép các robot thuộc các thương hiệu và hình dạng khác nhau lần đầu tiên "nói cùng một ngôn ngữ". Nhiều robot có thể truy cập vào một bus dữ liệu và giao diện điều khiển thống nhất thông qua cùng một hệ điều hành.
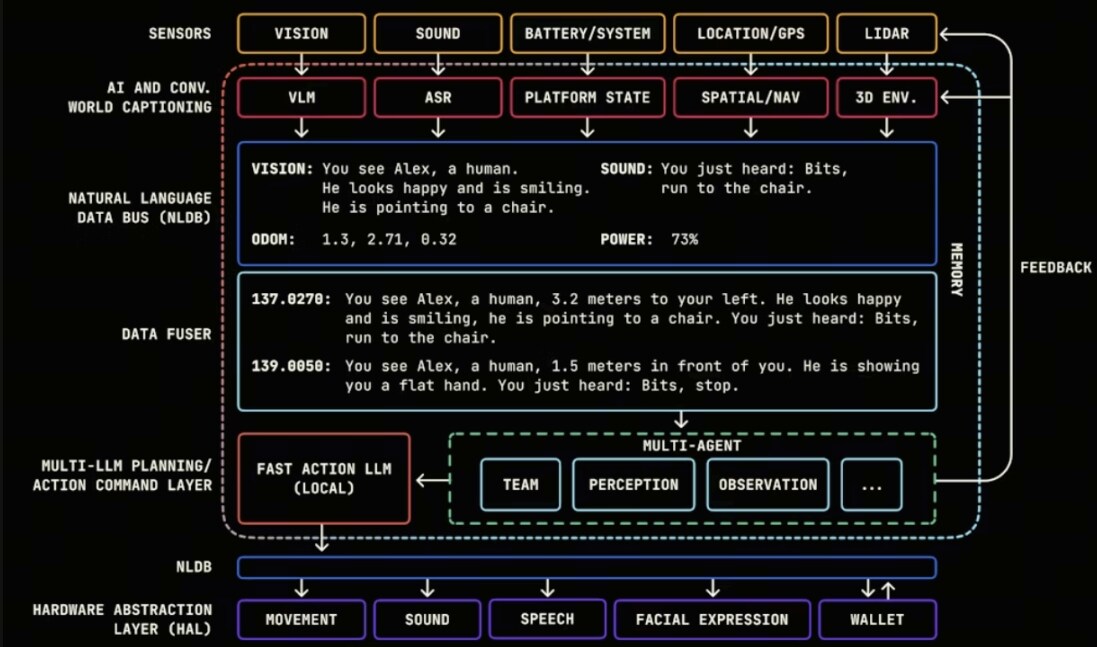
Nguồn: Openmind
Khả năng tương tác giữa các thương hiệu khác nhau này đã cho phép ngành công nghiệp thực sự thảo luận lần đầu tiên về:
● Hợp tác đa robot
● Đấu thầu và lên lịch công việc
● Cảm biến chung / Bản đồ chung
● Nhiệm vụ chung xuyên không gian
Sự hợp tác đòi hỏi "hiểu cùng một định dạng thông tin", và các hệ điều hành đa năng đang giải quyết vấn đề ngôn ngữ cơ bản này.
Trong các hệ thống cộng tác máy móc đa thiết bị, peaq đại diện cho một loại cơ sở hạ tầng quan trọng khác: một lớp giao thức cấp thấp cung cấp cho máy móc danh tính có thể xác minh, các ưu đãi kinh tế và khả năng phối hợp ở cấp độ mạng. (9)
Nó không đề cập đến "cách robot hiểu thế giới", mà là "cách robot có thể tham gia hợp tác với tư cách cá nhân trong một mạng lưới".
Thiết kế cốt lõi của nó bao gồm:
1. Nhận dạng máy
PeaQ cung cấp tính năng đăng ký danh tính phi tập trung cho robot, thiết bị và cảm biến, cho phép chúng:
● Truy cập bất kỳ mạng nào với tư cách là một thực thể độc lập
● Tham gia vào hệ thống phân công nhiệm vụ và đánh giá uy tín đáng tin cậy
Đây là điều kiện tiên quyết để một máy tính trở thành "nút mạng".
2. Tài khoản kinh tế tự chủ
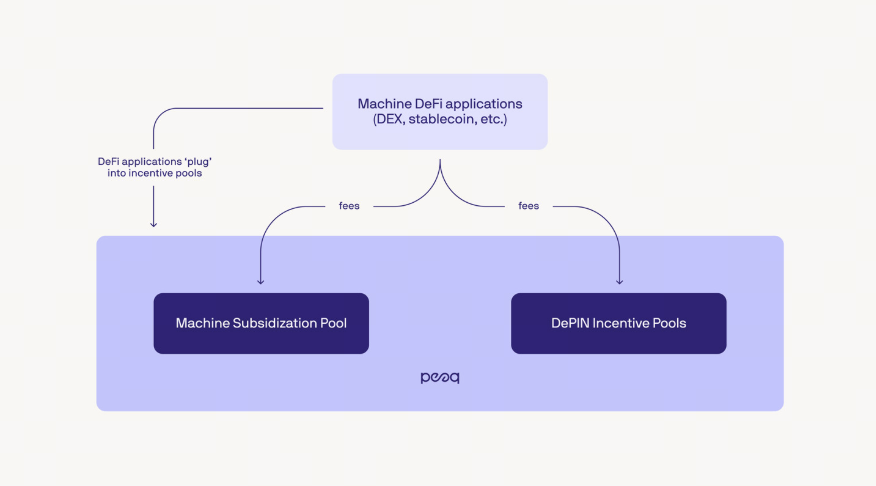
Nguồn: Peaq
Robot này được trao quyền tự chủ về kinh tế. Thông qua các phương thức thanh toán bằng stablecoin được hỗ trợ sẵn và logic lập hóa đơn tự động, robot có thể tự động đối chiếu tài khoản và thực hiện thanh toán mà không cần sự can thiệp của con người, bao gồm:
● Dữ liệu cảm biến được tính phí dựa trên số lượng.
● Thanh toán theo lượt sử dụng cho sức mạnh tính toán và suy luận mô hình
● Thanh toán tức thì sau khi robot hoàn thành dịch vụ (xử lý, giao hàng, kiểm tra)
● Tiếp cận cơ sở hạ tầng như trạm sạc tự phục vụ và không gian cho thuê
Ngoài ra, robot có thể sử dụng thanh toán có điều kiện:
● Nhiệm vụ hoàn tất → Thanh toán tự động
● Nếu kết quả không đạt mục tiêu → Tiền sẽ tự động bị đóng băng hoặc hoàn trả.
Điều này giúp cho sự hợp tác giữa các robot trở nên đáng tin cậy, có thể kiểm toán và tự động phân xử, một khả năng quan trọng cho việc triển khai thương mại quy mô lớn.
Hơn nữa, doanh thu do robot tạo ra khi cung cấp dịch vụ và tài nguyên trong thế giới thực có thể được mã hóa và ánh xạ lên blockchain, giúp giá trị và dòng tiền của nó được thể hiện một cách minh bạch, có thể truy vết, giao dịch và lập trình được, từ đó xây dựng một phương pháp biểu diễn tài sản với máy móc là chủ thể chính.
Khi trí tuệ nhân tạo (AI) và các hệ thống trên chuỗi (on-chain) trưởng thành, mục tiêu là cho phép máy móc tự động kiếm tiền, trả tiền, cho vay và đầu tư, trực tiếp thực hiện các giao dịch M2M, hình thành một mạng lưới kinh tế máy móc tự tổ chức và đạt được sự hợp tác và quản trị dưới hình thức một tổ chức tự trị phi tập trung (DAO).
3. Phối hợp tác vụ đa thiết bị
Ở cấp độ cao hơn, peaq cung cấp một khuôn khổ phối hợp giữa các máy móc, cho phép chúng:
● Chia sẻ thông tin về trạng thái và tình trạng sẵn có
● Tham gia đấu thầu và phân công nhiệm vụ
● Thực hiện lập lịch tài nguyên (sức mạnh tính toán, khả năng di động, khả năng cảm biến).
Điều này cho phép robot cộng tác như một mạng lưới các nút, thay vì hoạt động riêng lẻ. Chỉ khi ngôn ngữ và giao diện được thống nhất, robot mới thực sự có thể tham gia vào các mạng lưới cộng tác, thay vì chỉ hoạt động trong các hệ sinh thái khép kín của riêng chúng.
Các hệ điều hành thông minh đa thiết bị như OpenMind cố gắng chuẩn hóa cách robot "hiểu thế giới và hiểu các chỉ dẫn"; trong khi các mạng phối hợp Web3 như Peaq khám phá cách cho phép các thiết bị khác nhau đạt được khả năng cộng tác có thể kiểm chứng và có tổ chức trong một mạng lưới lớn hơn. Đây chỉ là một vài ví dụ trong số rất nhiều nỗ lực, phản ánh sự phát triển nhanh chóng của ngành công nghiệp hướng tới một lớp giao tiếp thống nhất và một hệ thống tương tác mở.
Mạng lưới kinh tế máy móc hỗ trợ sự tham gia tự động của máy móc vào thị trường.
Nếu các hệ điều hành đa thiết bị giải quyết được vấn đề "robot giao tiếp như thế nào" và các mạng lưới phối hợp giải quyết được vấn đề "chúng hợp tác ra sao", thì bản chất của mạng lưới kinh tế máy móc là chuyển đổi năng suất của robot thành dòng vốn bền vững, cho phép robot tự chi trả cho hoạt động của mình và tạo thành một vòng khép kín.
Một mảnh ghép quan trọng còn thiếu trong bài toán lâu đời của ngành công nghiệp robot là "khả năng kinh tế tự chủ". Robot truyền thống chỉ có thể thực hiện các chỉ dẫn được lập trình sẵn nhưng không thể tự phân bổ tài nguyên bên ngoài, định giá dịch vụ hoặc thanh toán chi phí. Khi tham gia vào các tình huống phức tạp, chúng phải dựa vào sự can thiệp của con người vào khâu kế toán, phê duyệt và lập kế hoạch, điều này làm giảm đáng kể hiệu quả hợp tác và khiến việc triển khai quy mô lớn trở nên khó khăn hơn.
x402: Trao cho robot "vị thế thực thể kinh tế" mà chúng xứng đáng được hưởng.
Nguồn: X@CPPP2443_
x402, với tư cách là tiêu chuẩn Thanh toán đại lý thế hệ tiếp theo, lấp đầy khoảng trống cơ bản này cho các bot. Bot có thể trực tiếp khởi tạo yêu cầu thanh toán thông qua lớp HTTP và hoàn tất các giao dịch thanh toán nguyên tử bằng cách sử dụng các stablecoin có thể lập trình như USDC. Điều này có nghĩa là bot không chỉ có thể hoàn thành nhiệm vụ mà còn tự động mua tất cả các tài nguyên cần thiết cho các nhiệm vụ đó.
● Phân bổ sức mạnh tính toán (suy luận LLM / suy luận mô hình điều khiển)
● Quyền tiếp cận hiện trường và cho thuê thiết bị
● Dịch vụ lao động cho các robot khác
Lần đầu tiên, robot có khả năng tiêu thụ và sản xuất một cách tự chủ, giống như các thực thể kinh tế.
Những năm gần đây, đã có những trường hợp hợp tác tiêu biểu giữa các nhà sản xuất robot và cơ sở hạ tầng mã hóa, cho thấy mạng lưới kinh tế máy móc đang chuyển từ lý thuyết sang thực tế.
OpenMind × Circle: Kích hoạt hỗ trợ thanh toán bằng stablecoin gốc cho bot

Nguồn: Openmind
OpenMind đã tích hợp hệ điều hành robot đa thiết bị của mình với USDC của Circle, cho phép robot sử dụng stablecoin trực tiếp trong chuỗi thực thi tác vụ để hoàn tất các khoản thanh toán và quyết toán.
Điều này thể hiện hai bước đột phá:
1. Chuỗi thực thi tác vụ của robot có thể tích hợp trực tiếp với quy trình thanh toán tài chính, không còn phụ thuộc vào các hệ thống phụ trợ.
2. Robot có thể thực hiện "thanh toán không biên giới" trong môi trường đa nền tảng và đa thương hiệu.
Đối với sự hợp tác giữa các máy móc, đây là một khả năng cơ bản để tiến tới nền kinh tế tự động hóa.
Kite AI: Xây dựng nền tảng blockchain gốc tác nhân cho nền kinh tế máy móc

Nguồn: Kite AI
Kite AI tiếp tục phát triển cấu trúc cơ bản của nền kinh tế máy móc: nó được thiết kế đặc biệt cho các tác nhân AI có danh tính trên chuỗi, ví có thể kết hợp và hệ thống thanh toán và quyết toán tự động, cho phép các tác nhân tự động thực hiện các giao dịch khác nhau trên chuỗi. (10)
Nó cung cấp một "môi trường vận hành kinh tế tự chủ" hoàn chỉnh, có khả năng tương thích cao với sự tham gia tự chủ vào thị trường mà robot mong muốn đạt được.
1. Lớp Nhận dạng Tác nhân/Máy móc (Hộ chiếu Kite) : Cấp phát danh tính được mã hóa và hệ thống khóa đa lớp cho mỗi Tác nhân AI (có thể được ánh xạ tới các robot cụ thể trong tương lai). Điều này cho phép kiểm soát chính xác "ai chi tiền" và "họ đại diện cho ai", đồng thời hỗ trợ việc thu hồi và chịu trách nhiệm bất cứ lúc nào. Đây là tiền đề để coi các Tác nhân như những chủ thể kinh tế độc lập.
2. Hỗ trợ stablecoin gốc + tích hợp giao thức x402 : Kite tích hợp tiêu chuẩn thanh toán x402 ở cấp độ chuỗi, sử dụng các stablecoin như USDC làm tài sản thanh toán mặc định. Điều này cho phép các tác nhân hoàn tất việc gửi, nhận và đối chiếu thông qua ủy quyền ý định được tiêu chuẩn hóa. Nền tảng này đã thực hiện các tối ưu hóa cơ bản cho các kịch bản thanh toán tần suất cao, số lượng nhỏ và giữa máy với máy (xác nhận dưới một giây, phí thấp và khả năng kiểm toán).
3. Các ràng buộc và quản trị có thể lập trình : Thông qua các chính sách trên chuỗi, giới hạn chi tiêu, danh sách trắng các thương gia/hợp đồng được phép, quy tắc kiểm soát rủi ro và nhật ký kiểm toán có thể được thiết lập cho các tác nhân, để "ví mở cho máy móc" có thể tìm được sự cân bằng giữa bảo mật và quyền tự chủ.
Nói cách khác, nếu hệ điều hành của OpenMind cho phép robot "hiểu thế giới và hợp tác", thì cơ sở hạ tầng blockchain của Kite AI cho phép robot "tồn tại trong hệ thống kinh tế".
Thông qua các công nghệ nêu trên, mạng lưới kinh tế máy móc xây dựng một "động lực hợp tác" và một "vòng tuần hoàn giá trị khép kín", cho phép robot không chỉ "trả tiền" mà quan trọng hơn, còn cho phép chúng:
● Thu nhập dựa trên hiệu quả công việc (thanh toán dựa trên kết quả)
● Mua tài nguyên theo yêu cầu (cấu trúc chi phí tự chủ)
● Tham gia cạnh tranh thị trường dựa trên uy tín trên chuỗi (hiệu suất có thể kiểm chứng)
Điều này có nghĩa là lần đầu tiên, robot có thể tham gia vào một hệ thống khuyến khích kinh tế hoàn chỉnh: chúng có thể làm việc → kiếm tiền → tiêu tiền → tự động tối ưu hóa hành vi của mình.
Tóm tắt
Triển vọng
Nhìn vào ba hướng chính đã đề cập ở trên, vai trò của Web3 trong ngành công nghiệp robot đang dần trở nên rõ ràng:
● Lớp dữ liệu : Cung cấp sức mạnh cho việc thu thập dữ liệu quy mô lớn, đa nguồn và cải thiện phạm vi bao phủ các kịch bản hiếm gặp;
● Lớp cộng tác : Giới thiệu cơ chế nhận dạng thống nhất, khả năng tương tác và quản lý tác vụ cho sự cộng tác giữa các thiết bị;
● Lớp kinh tế : Cung cấp một khung lập trình cho hành vi kinh tế của robot thông qua các khoản thanh toán trên chuỗi và các giao dịch thanh toán có thể kiểm chứng.
Những khả năng này cùng nhau tạo nên nền tảng cho một mạng internet máy móc tiềm năng trong tương lai, cho phép robot cộng tác và hoạt động trong một môi trường công nghệ cởi mở và minh bạch hơn.
Sự không chắc chắn
Mặc dù hệ sinh thái robot đã đạt được bước đột phá chưa từng có vào năm 2025, quá trình chuyển đổi từ "khả thi về mặt kỹ thuật" sang "có thể mở rộng và bền vững" vẫn còn đầy rẫy những bất trắc. Những bất trắc này không xuất phát từ một nút thắt công nghệ duy nhất, mà từ sự kết hợp phức tạp của các yếu tố kỹ thuật, kinh tế, thị trường và thể chế.
Tính khả thi về kinh tế có thực sự đúng đắn?
Mặc dù đã có những bước đột phá về nhận thức, điều khiển và trí thông minh, việc triển khai robot trên quy mô lớn cuối cùng vẫn phụ thuộc vào việc liệu nhu cầu kinh doanh thực tế và lợi nhuận kinh tế có thành hiện thực hay không. Hiện nay, hầu hết các robot hình người và robot đa năng vẫn đang trong giai đoạn thử nghiệm và kiểm chứng. Việc các công ty có sẵn sàng trả tiền cho dịch vụ robot trong dài hạn hay không, và liệu mô hình OaaS/RaaS có thể đạt được tỷ suất lợi nhuận đầu tư (ROI) cao một cách nhất quán trong các ngành khác nhau hay không, vẫn còn thiếu dữ liệu dài hạn đầy đủ để hỗ trợ nghiên cứu.
Trong khi đó, lợi thế về hiệu quả chi phí của robot trong môi trường phức tạp, không có cấu trúc rõ ràng vẫn chưa được chứng minh đầy đủ. Trong nhiều trường hợp, tự động hóa truyền thống hoặc các giải pháp thay thế do con người thực hiện vẫn rẻ hơn và đáng tin cậy hơn. Điều này có nghĩa là tính khả thi về công nghệ không tự động chuyển thành nhu cầu kinh tế, và sự không chắc chắn về tốc độ thương mại hóa sẽ ảnh hưởng trực tiếp đến tốc độ mở rộng của toàn ngành.
Những thách thức mang tính hệ thống đối với độ tin cậy kỹ thuật và tính phức tạp trong vận hành.
Thách thức thực sự lớn nhất mà ngành công nghiệp robot phải đối mặt thường không phải là liệu nó có thể "hoàn thành nhiệm vụ" hay không, mà là liệu nó có thể hoạt động ổn định và tiết kiệm chi phí trong dài hạn hay không. Trong các triển khai quy mô lớn, tỷ lệ hỏng hóc phần cứng, chi phí bảo trì, nâng cấp phần mềm, quản lý năng lượng, và các vấn đề về an toàn và trách nhiệm pháp lý đều có thể nhanh chóng leo thang thành rủi ro hệ thống.
Ngay cả khi mô hình OaaS giảm chi phí đầu tư ban đầu, các chi phí ẩn trong hoạt động, bảo hiểm, trách nhiệm pháp lý và tuân thủ vẫn có thể làm suy yếu mô hình kinh doanh tổng thể. Nếu độ tin cậy không đáp ứng được các yêu cầu tối thiểu cho các ứng dụng thương mại, tầm nhìn về mạng lưới robot và nền kinh tế máy móc sẽ khó có thể trở thành hiện thực.
Hợp tác sinh thái, hội tụ tiêu chuẩn và thích ứng thể chế
Hệ sinh thái robot đang trải qua quá trình tiến hóa nhanh chóng đồng thời về hệ điều hành, khung phần mềm tác nhân, giao thức blockchain và tiêu chuẩn thanh toán, nhưng vẫn còn rất phân mảnh. Việc hợp tác giữa các thiết bị, nhà cung cấp và hệ thống khác nhau rất tốn kém, và các tiêu chuẩn chung vẫn chưa hoàn toàn hội tụ, có khả năng dẫn đến sự phân mảnh hệ sinh thái, phát triển dư thừa và tổn thất hiệu quả.
Đồng thời, robot có khả năng tự ra quyết định và hoạt động kinh tế đang thách thức các khuôn khổ pháp lý và quy định hiện hành: việc phân định trách nhiệm, tuân thủ thanh toán, và ranh giới về dữ liệu và bảo mật vẫn chưa rõ ràng. Nếu các quy định và tiêu chuẩn không theo kịp sự phát triển của công nghệ, các mạng lưới kinh tế dựa trên máy móc sẽ phải đối mặt với nhiều bất ổn về mặt tuân thủ và triển khai.
Nhìn chung, các điều kiện để ứng dụng robot trên quy mô lớn đang dần hình thành, và những yếu tố cơ bản của một hệ thống kinh tế máy móc đang xuất hiện trong thực tiễn công nghiệp. Mặc dù Web3 × Robotics vẫn còn ở giai đoạn đầu, nhưng nó đã chứng minh tiềm năng phát triển lâu dài đáng chú ý.
Tài liệu tham khảo
1. https://www.morganstanley.com/insights/articles/humanoid-robot-market-5-trillion-by-2050
5. http://www.xinhuanet.com/tech/20250908/89cc1111e729403ca5af4a397ebd01ce/c.html
7. https://orbilu.uni.lu/bitstream/10993/39438/1/comst-preprint.pdf


