
機器經濟的崛起:Web3 如何推動機器人從工具走向自治系統
- 核心观点:机器人产业正迈向“物理+智能+金融+组织”的系统性重塑。
- 关键要素:
- 技术成熟:AI、仿真、硬件多技术收敛,实现规模化部署。
- 资本涌入:巨额融资验证产业拐点与商业化路径。
- 经济赋能:Web3提供支付、身份与协作框架,支撑机器自主经济。
- 市场影响:催生新商业模式与协作网络,重塑价值捕获方式。
- 时效性标注:长期影响
簡介
近年來,機器人產業迎來了技術與商業範式的雙重轉折點。過去的機器人更多被視為“工具”,依賴企業後台調度、無法自主協作、也不具備經濟行為能力。但隨著AI Agent、鏈上支付(x402)、Machine Economy 等新技術的融合,機器人生態正在從單一維度的硬體競爭,演變為由「身體—智慧—支付—組織」組成的多層複雜系統。
更值得關注的是,全球資本市場也對此趨勢迅速定價。摩根士丹利預測,到2050 年,人形機器人市場規模可能高達5 兆美元,並進一步帶動供應鏈、維運、服務等周邊產業的成長。同年,投入使用的人形機器人可望突破10 億台。這意味著機器人將從工業設備,真正邁向「規模化社會參與者」。 (1)
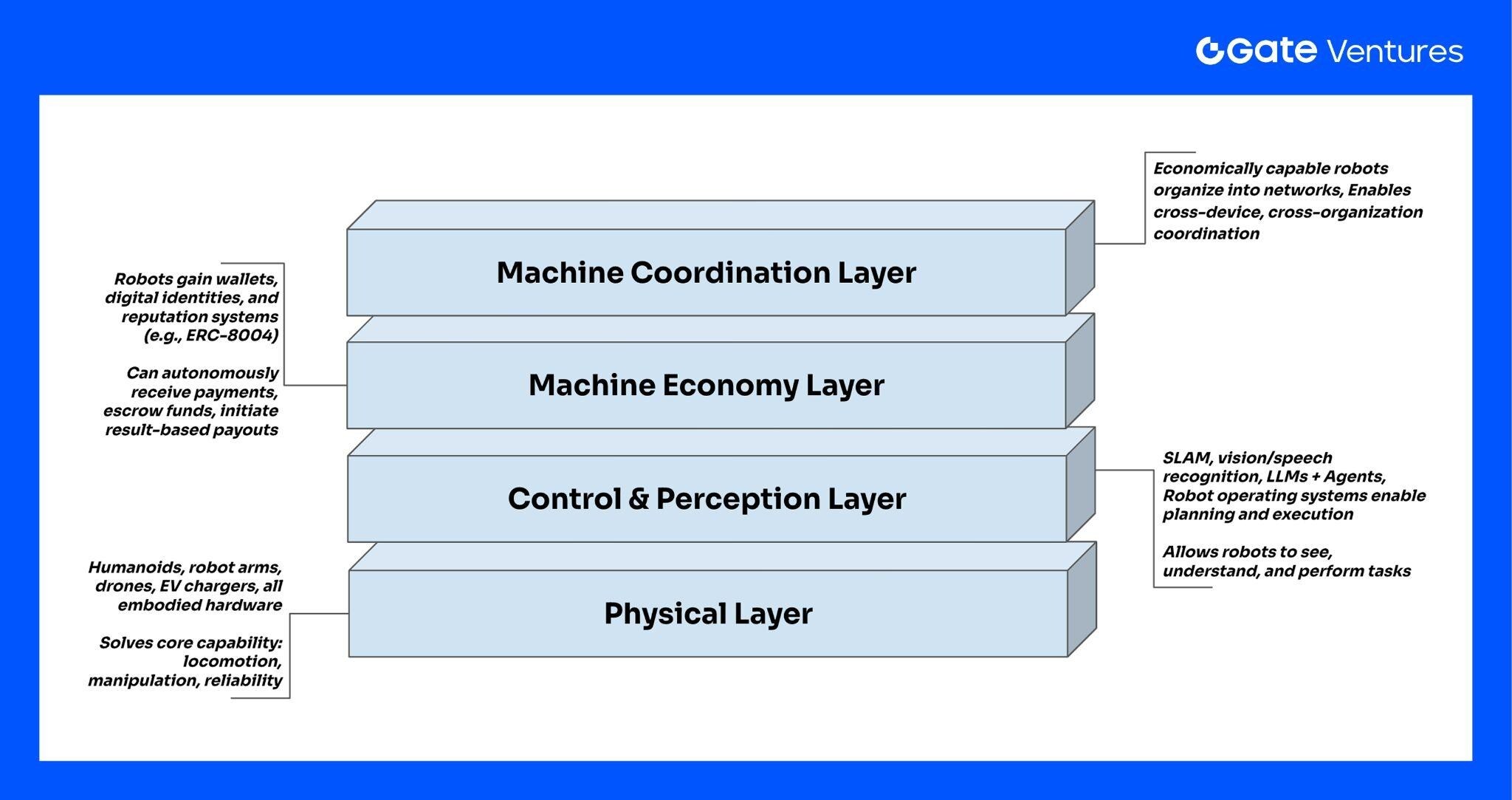
為了理解機器人產業未來的發展方向,我們可以將整個生態理解為四個清晰的層次結構:
Source: Gate Ventures
第一層是物理基座(Physical Layer):包括humanoid、機械臂、無人機、EV 充電樁等所有具身載體。它們解決的是基礎行動與作業能力問題,例如行走、抓取、機械可靠性與成本。然而,這一層的機器依舊是「無經濟行為能力」的,即無法自主完成收費、支付或服務採購等行為。
第二層是控制與感知層(Control & Perception Layer):涵蓋傳統機器人控制論、SLAM、感知系統、語音視覺識別,到現今的LLM+Agent,以及越來越多具備抽象規劃能力的機器人作業系統(如ROS、OpenMind OS)。這一層讓機器“聽得懂、看得見、能執行任務”,但支付、合約、身份等經濟活動依然必須由人類在後台處理。
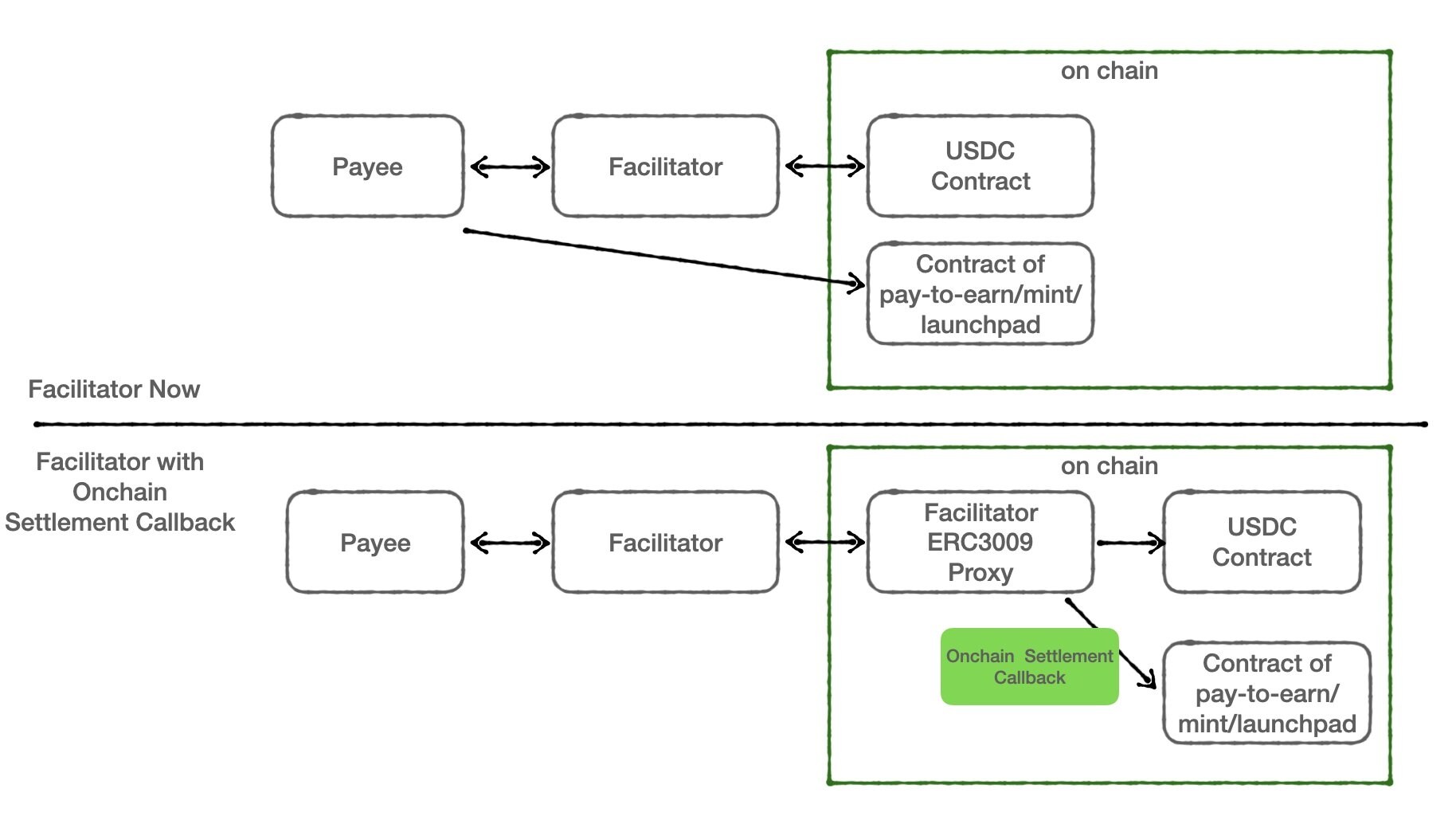
第三層是經濟結算層(Machine Economy Layer):真正的改變從這裡開始。機器開始擁有錢包、數位身分、信譽體系(如ERC-8004),並透過x402、鏈上結算、Onchain Callback 等機制直接為算力、資料、能源、路權付費;同時也能因執行任務而自主收款、託管資金、發起結果導向支付(result-based payresult-based payresult-based pay)。這一層讓機器人從“企業資產”躍遷為“經濟主體”,具備參與市場的能力。
第四層是協調與治理層(Machine Coordination Layer):當大量機器人具備自主支付與身分後,它們便能夠進一步組織成機隊與網路—無人機集群、清潔機器人網路、EV 能源網等。它們能夠自動調價、排班、競價任務、共享收益,甚至以DAO 的形式形成自治經濟體。
透過以上四層結構,我們可以看到:
未來的機器人生態,不再只是硬體革命,而是「物理+ 智慧+ 金融+ 組織」的系統性重塑。
這不僅重新定義了機器的能力邊界,也重新定義了價值捕獲的方式。無論是機器人公司、AI 開發者、基礎設施供應商,或是加密原生的支付與身分協議,都將在新的機器人經濟體系中找到各自的位置。
為什麼機器人產業會在此刻爆發?
過去幾十年,機器人產業始終在實驗室、展台與特定工業場景徘徊,距離真正的規模化商用與社會化部署始終一步之遙。然而2025 年之後,這一步驟開始被跨越。無論從資本市場、技術成熟度,或是從產業觀察者如英偉達CEO Jensen Huang 的判斷,都傳遞出同一個訊號:
“The ChatGPT moment for general robotics is just around the corner”
這項判決並非誇大宣傳,而是基於三個關鍵產業訊號:
1. 算力、模型、模擬、感知控制等基本功同時成熟
2. 機器人智慧從封閉式控制→ LLM/Agent 驅動的開放式決策
3. 從單機能力到系統能力的躍遷:機器人將從“能動”變為“能協作、能理解、能經濟地運作”
黃仁勳甚至進一步預測,人形機器人將在未來5 年內走向廣泛商用,這一觀點與2025 年資本市場和產業落地的行為高度一致。
資本層面:巨額融資證明「機器人拐點」已經被市場定價
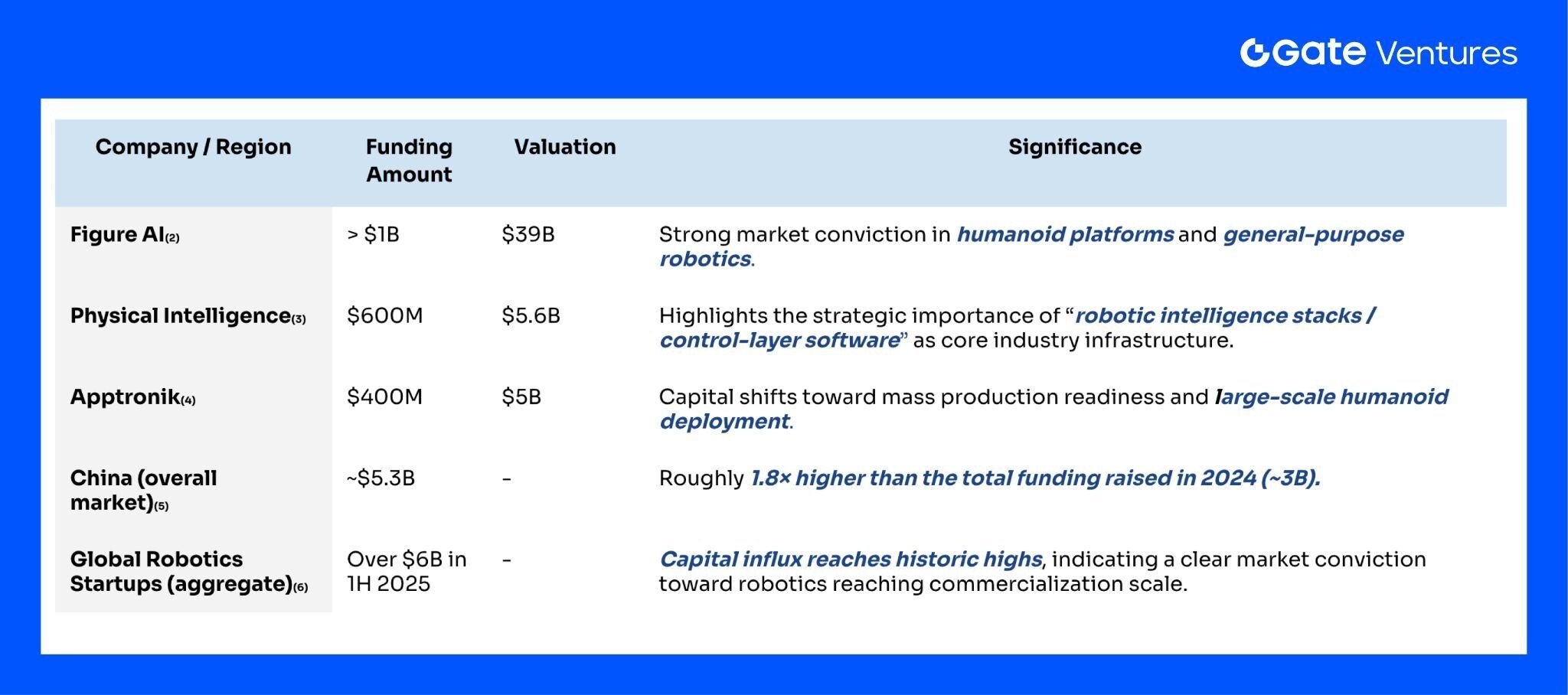
2024–2025 年,機器人產業出現了前所未有的融資密度與規模,光是2025 一年就出現多筆超5 億美元等級融資,典型事件包括:
Source: Gate Ventures
資本明確表達:機器人產業已經到達投資可驗證階段。
這些融資的共同特徵:
● 不是“概念融資”,而是生產線、供應鏈、一般智慧、商業化部署方向
● 不是零散項目,而是軟硬結合、全端架構、機器人全生命週期服務體系
資本不會無端押注百億規模,背後是對產業成熟度的確認。
技術層面:決定性突破同時出現
機器人產業在2025 年迎來了歷史罕見的「多技術收斂」。首先,AI Agent 與大型語言模型的突破,讓機器人從過去只能執行指令的“可操作機器”,升級為能夠理解語言、分解任務、結合視覺與觸覺進行推理的“可理解智能體”。多模態感知與新一代控制模型(如RT-X、Diffusion Policy)讓機器人首次具備接近通用智慧的基礎能力。
Source: Nvidia
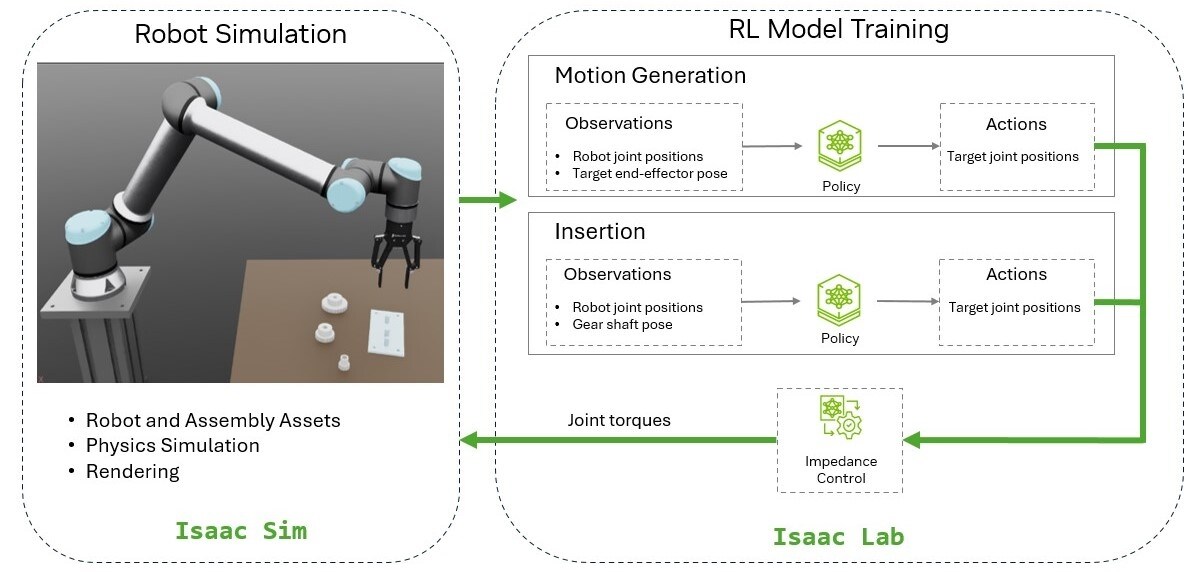
同時,仿真與遷移技術快速成熟。 Isaac、Rosie 等高保真模擬環境顯著縮小模擬到現實差距,使機器人能夠在虛擬環境中以極低成本完成大規模訓練,並可靠地遷移到現實世界。這解決了過去機器人學習速度慢、資料收集貴、真實環境風險高的根本瓶頸。
硬體端的演進同樣關鍵。力矩馬達、關節模組、感測器等核心零件因供應鏈規模化而持續降本,中國在全球機器人供應鏈中的加速崛起更進一步提升了產業生產力。隨著多家公司啟動量產計劃,機器人首次具備了「可複製、可規模部署」的工業基礎。
最後,可靠性與能耗結構上所取得的改進,使機器人真正滿足商業應用的最低門檻。更好的馬達控制、冗餘安全系統以及即時作業系統,讓機器人能夠在企業級場景中長時間穩定運作。
以上因素使得機器人產業第一次具備從「實驗室Demo 階段」邁向「規模化真實部署」的完整條件。這正是機器人爆發發生在當下的根本原因。
商業化層面:從原型機→ 量產機→ 真實世界部署
2025 年也是機器人商業化路徑首次清晰顯現的一年。 Apptronik、Figure、Tesla Optimus 等頭部公司陸續公佈量產計劃,標誌著人形機器人從原型機進入可複製的工業化階段。同時,多家企業開始在倉儲物流、工廠自動化等高需求場景落地試辦部署,驗證機器人在真實環境中的效率與可靠性。
伴隨硬體量產能力的提升,「Operation-as-a-Service(OaaS)」模式開始獲得市場驗證。企業無需一次性支付高額購買成本,而是每月訂閱機器人服務,從而顯著改善ROI 結構。這一模式成為推動機器人規模化應用的關鍵商業創新。
此外,業界正快速補齊先前缺乏的服務體系,包括維修網路、備品供應、遠端監控與維運平台等基礎設施。隨著這些能力的成型,機器人開始具備持續運作與商業閉環所需的完整條件。
整體而言,2025 年是機器人從「能不能做」轉向「能不能賣、能不能用、用得起」 的里程碑年份,商業化路徑首次出現可持續的正向循環。
Web3 X 機器人生態
伴隨著2025 年機器人產業的全面爆發,區塊鏈技術也在其中找到清晰的定位,為機器人體系補足若干關鍵能力。其核心價值主要可歸納為三個核心方向:i.)機器人技術的數據收集,ii.)跨設備的機器協調網絡,以及iii.)支撐機器自主參與市場的機器經濟網絡。
去中心化+ 代幣激勵機制,為機器人訓練建構新型資料來源,但資料品質需依賴後端Data Engine 提升
訓練Physical-AI 模型的核心瓶頸在於真實世界資料的規模、場景覆蓋、與高品質物理互動資料的稀缺性。 DePIN/DePAI 的出現,使得Web3 能夠在「誰來貢獻資料、如何持續貢獻」這一層面提供新的解決方案。
然而,從學術研究來看,去中心化數據雖然在規模與覆蓋上具有潛力,但本身並不自然等同於高質量訓練數據,仍需後端data engine 進行篩選、清洗與偏差控制,才能真正用於大模型訓練。
首先,Web3 解決的是「數據供給動力」問題,而非直接保證「數據品質」。
傳統機器人訓練資料主要來自實驗室、小規模車隊或企業內部採集,規模指數級不足。
Web3 的DePIN/DePAI 模式透過代幣激勵讓一般使用者、裝置營運商或遠端操作者成為資料貢獻者,大幅提升資料來源的規模與多樣性。
項目包括:
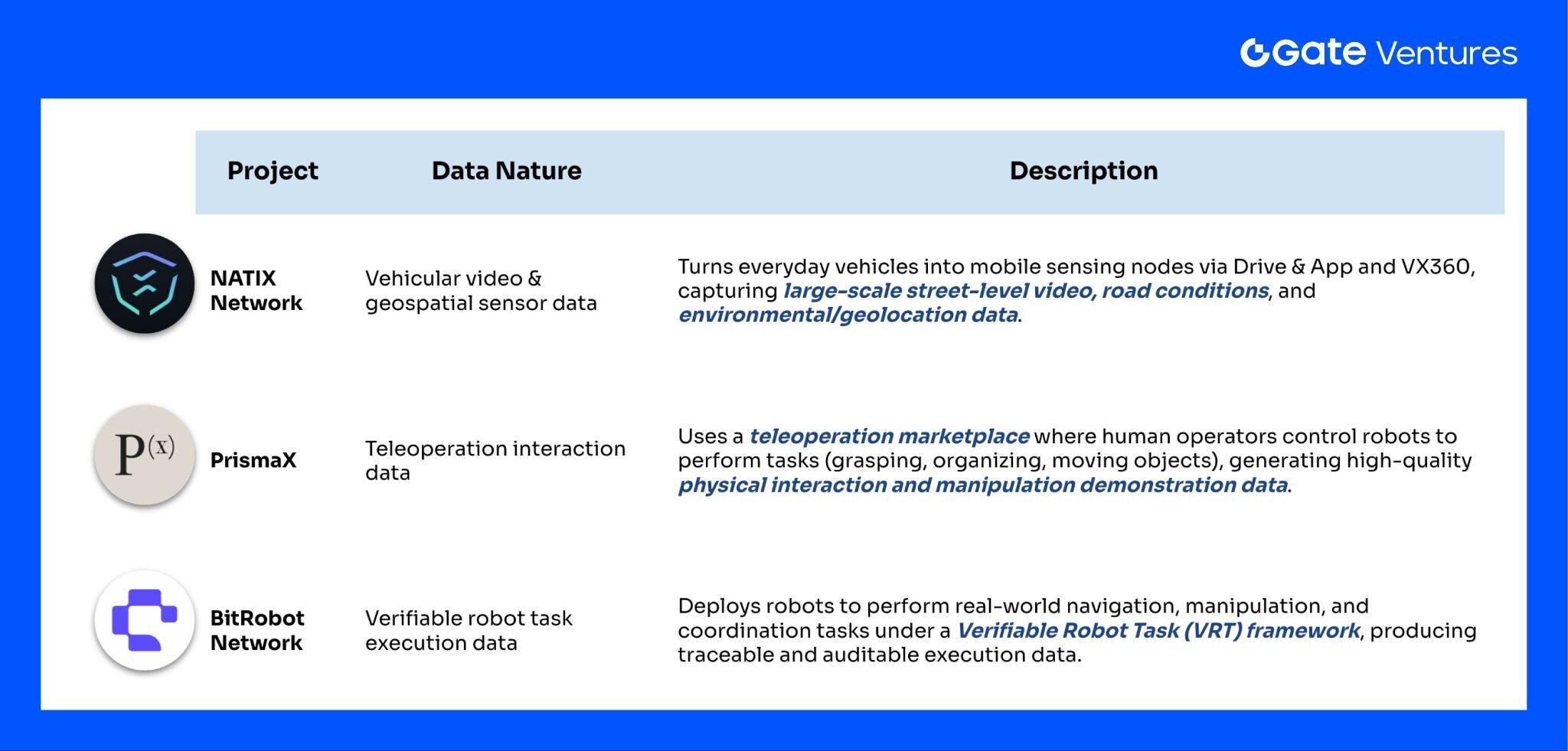
Source: Gate Ventures
● NATIX Network:透過Drive& App 與VX360 把大眾車輛變成行動資料節點,擷取影片、地理、環境資料。
● PrismaX:透過遠端操控市場收集高品質的機器人實體互動資料(抓取、整理、移動物品)。
● BitRobot Network:讓機器人節點執行可驗證任務(VRT),產生真實操作、導航、協作行為的資料。
這些項目說明Web3 能有效擴大資料供應側,補足傳統體系難以涵蓋的現實場景與長尾情況。
但根據學術研究,眾包/去中心化資料通常存在「精確度不足、噪音高、偏差大」的結構性問。學術界對crowdsourcing 與mobile crowdsensing 的大量研究指出:
1. 資料品質波動大、雜訊與格式差異顯著
不同貢獻者的設備、操作方式與理解差異會帶來大量不一致數據,需要偵測與過濾。
2. 結構性偏差(bias)普遍存在
參與者通常聚集於特定區域/群體,導致採樣分佈與真實世界分佈不一致。
3. 原始眾包資料無法直接用於模型訓練
自動駕駛、具身AI、機器人學研究廣泛強調:高品質訓練集需要經過:採集→ 品質審查→ 冗餘對齊→ 資料增強→ 長尾補全→ 標籤一致性校正的完整流程,而不是「採集即用」。 (7)
因此,Web3 的資料網路提供更廣泛的資料來源,但「是否能直接成為訓練資料」 取決於後端的資料工程。
DePIN 的真正價值,是為Physical AI 提供「持續、可擴展、成本更低」的資料底座
與其說Web3 立即解決了資料精度問題,不如說它解決了:
● “誰願意長期貢獻數據?”
● “如何鼓勵更多真實設備接取?”
● “如何讓資料擷取模式從中心化走向永續的開放網路?”
換言之, DePIN/DePAI 為資料規模與覆蓋提供基礎,這使Web3 成為Physical AI 時代「資料來源層」的重要拼圖,但不是資料品質的唯一保證者。
跨裝置的機器協調網路:通用OS 為機器人協作提供基礎通訊層
當前機器人產業正從單機智慧邁向群體協作,但一個關鍵瓶頸始終存在:不同品牌、不同形態、不同技術棧的機器人無法分享資訊、無法互通,也缺乏統一的溝通媒介。這使得多機協作只能依賴廠商自建的封閉系統,極大限制規模化部署。
近年來出現的通用機器人作業系統層(Robot OS Layer),以OpenMind 為代表,正為此問題提供新的解法。這類系統並不是傳統意義上的“控制軟體”,而是跨機體的智慧型作業系統,像Android 之於手機產業一樣,為機器人之間的通訊、認知、理解與協作提供共同語言和公共基礎設施。 (8)
在傳統架構中,每台機器人內部的感測器、控制器、推理模組彼此割裂,跨裝置間完全無法共享語意資訊。而通用作業系統層透過統一感知介面、決策格式與任務規劃方式,讓機器人首次取得:
● 對外界的抽象描述(vision / sound / tactile → structured semantic events)
● 對指令的統一理解(自然語言→ 動作規劃)
● 可共享的多模態狀態表達
這相當於從底座為機器人裝上了一個能夠理解、表達、學習的認知層。
機器人因此不再是“孤立執行器”,而是具備統一的語義接口,能夠被納入更大規模的機器協作網絡。
另外,通用OS 的最大突破在於“跨機體相容性”,不同品牌、不同形態的機器人第一次能“說同一種語言”。各種機器人都可以透過同一個OS 存取統一的資料匯流排與控制介面。
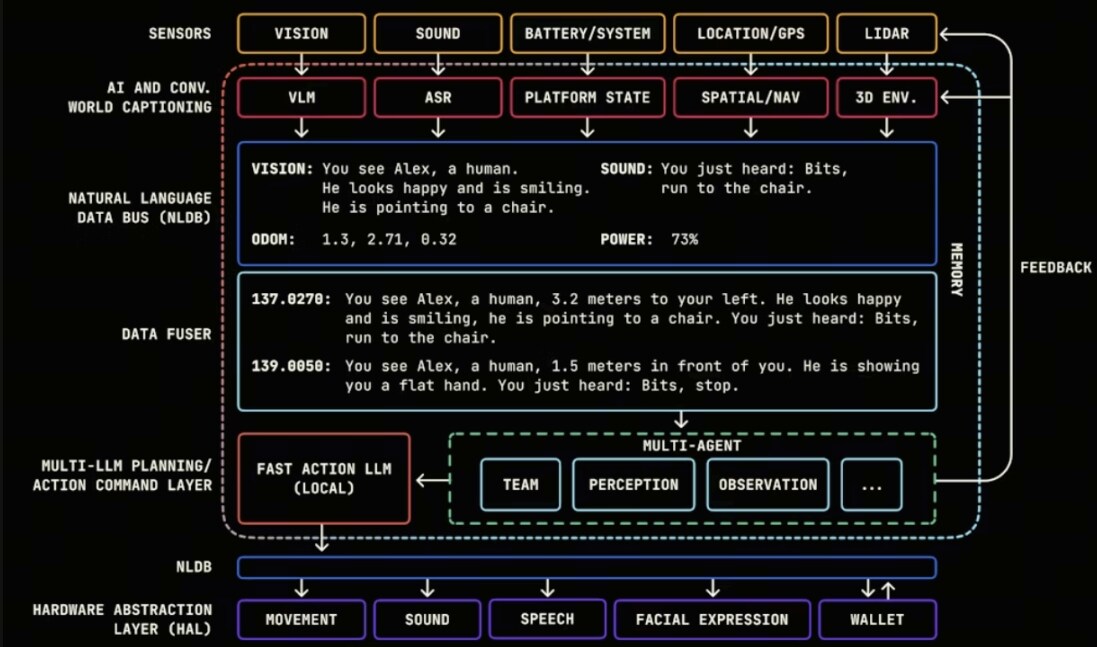
Source: Openmind
這種跨品牌的互通能力,使得業界第一次能夠真正討論:
● 多機器人協作
● 任務競價與調度
● 共享感知/ 共享地圖
●跨空間聯合執行任務
協作的前提是“理解相同的資訊格式”,通用OS 正在解決這一底層語言問題。
而在跨裝置機器協作的體系中,peaq 代表了另一類關鍵基礎設施方向:為機器提供可驗證身分、經濟激勵與網路層級協調能力的底層協定層。 (9)
它解決的不是機器人“如何理解世界”,而是機器人“如何在網路中作為個體參與協作”。
其核心設計包括:
1. 機器身份
peaq 為機器人、設備、感測器提供去中心化身分註冊,使其能夠:
● 以獨立個體接取任意網絡
● 參與可信賴的任務分配與信譽體系
這是機器成為「網路節點」的前置條件。
2. 自主經濟帳戶
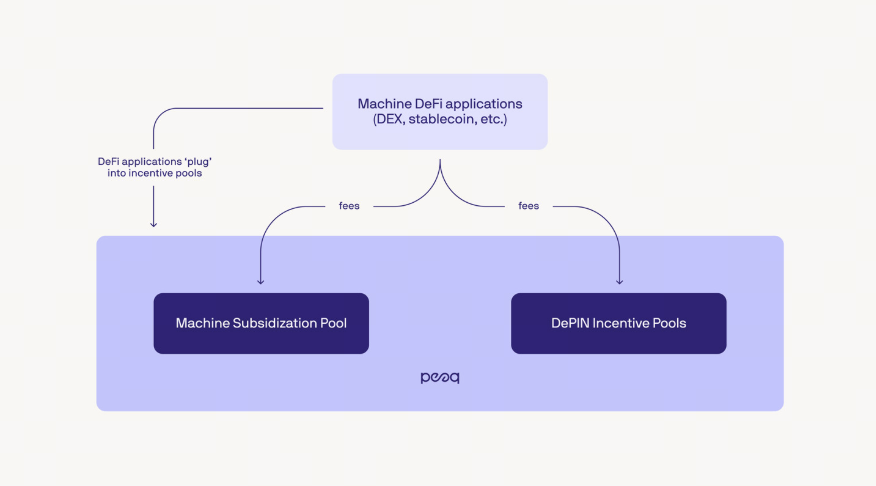
Source: Peaq
機器人被賦予了經濟自主性。透過原生支援的穩定幣支付與自動計費邏輯,機器人可以在無需人為幹預的情況下自動對帳與付款,包括:
●感測器資料按量結算
● 算力與模型推理的按次呼叫付費
● 機器人之間提供服務後的即時結算(搬運、配送、偵測)
●自主充電、租賃空間等基礎設施調用
另外,機器人可採用條件支付:
● 任務完成→ 自動支付
● 結果不符合標準→ 資金自動凍結或回退
這讓機器人協作變得可信賴、可審計且可自動仲裁,是規模化商業部署的關鍵能力。
再者,機器人在現實世界中提供服務與資源所產生的收入,可以被代幣化並映射至鏈上,使其價值與現金流以透明、可追踪、可交易且可編程的形式呈現,從而構建出以機器為主體的資產表示方式。
隨著AI 與鏈上系統成熟,目標是讓機器將能夠自主賺取、支付、借貸與投資,直接進行M2M 交易,形成自組織的機器經濟網絡,並以DAO 形式實現協作與治理。
3. 多設備任務協調
在更高層級,peaq 提供機器之間的協調框架,使其可以:
● 共享狀態與可用性資訊
● 參與任務競標與匹配
● 進行資源調度(算力、移動能力、感測能力)
從而使機器人能夠像節點網路一樣協同,而非孤立運作。當語言與介面統一後,機器人才能真正進入協作網絡,而不是停留在各自封閉的生態中。
OpenMind 這類跨機體智慧OS 試圖標準化機器人「理解世界與理解指令」的方式; 而Peaq 這類Web3 協調網路則探討如何讓不同裝置在更大的網路中獲得可驗證的組織化協作能力。它們只是眾多嘗試中的代表,反映了整個產業正朝著統一通訊層與開放式互通體系加速演進。
支撐機器自主參與市場的機器經濟網絡
如果說跨設備操作系統解決了機器人“如何溝通”、協調網絡解決了“如何合作”,那麼機器經濟網絡的本質,便是將機器人的生產力轉化為可持續資本流,讓機器人能夠為自身的運行買單並形成閉環。
機器人產業長期缺少的一塊關鍵拼圖是「自主經濟能力」。傳統機器人只能執行預設指令,卻無法獨立調度外部資源、為自身服務定價,或結算成本。一旦進入複雜場景,它們就必須依賴人類後台做帳、審批與調度,於是協作效率被嚴重拖累,而規模化部署更難以實現。
x402:為機器人補齊“經濟主體資格”
Source: X@CPPP2443_
x402 作為新一代Agentic Payment 標準,為機器人補上了這項根本能力。機器人可以直接透過HTTP 層發起支付請求,並以USDC 等可編程穩定幣完成原子化結算。這意味著機器人不僅能完成任務,還能為任務所需的一切資源自主購買:
● 算力調用(LLM 推理/ 控制模型推理)
● 場景通行與設備租用
● 其他機器人的勞務服務
從此機器人第一次可以像經濟主體一樣自主消費與生產。
而近年來,機器人廠商與加密基礎設施的合作開始出現具有代表性的案例,顯示機器經濟網路正從概念走向落地。
OpenMind × Circle:讓機器人可以原生支援穩定幣支付

Source: Openmind
OpenMind 將其跨設備機器人OS 與Circle 的USDC 集成,使機器人能夠直接在任務執行鏈路中使用穩定幣完成支付與結算。
這代表兩個突破:
1. 機器人任務執行連結能夠原生存取金融結算,不再依賴後台系統
2. 機器人能夠在跨平台、跨品牌環境中“無國界支付”
對機器協作來說,這是邁向自治經濟體的基礎能力。
Kite AI:為機器經濟建構Agent-Native 區塊鏈底座

Source: Kite AI
Kite AI 則進一步推進了機器經濟的底層結構:它專為AI agents 設計鏈上身份、可組合錢包、自動化支付與結算系統,讓agent 可以在鏈上自主執行各種交易。 (10)
它提供的是一個完整的“自治agent 經濟運作環境”,與機器人要實現的自主參與市場高度契合。
1. Agent / 機器身份層(Kite Passport) :為每個AI Agent(未來也可以映射到具體機器人)發放加密身份與多層密鑰體系,可以精細控制“誰在花錢”“代表誰行動”,並支持隨時撤銷與追責,這是把Agent 視作獨立經濟行為體的前提。
2. 穩定幣原生+ x402 原語內置:Kite 在鏈級別集成x402 支付標準,把USDC 等穩定幣作為默認結算資產,使Agent 能通過標準化的intent 授權完成發送、接收與對賬,針對高頻、小額、機器對機器的支付場景做了底層優化(亞秒級確認成本、可審計)。
3. 可程式約束與治理:透過鏈上策略,為Agent 設定支出上限、允許的商家/ 合約白名單、風控規則與稽核軌跡,讓「給機器開錢包」這件事在安全與自主之間找到平衡。
換句話說,如果OpenMind 的OS 讓機器人“能理解世界、能協作”,那麼Kite AI 的區塊鏈基礎設施讓機器人“能在經濟系統中生存”。
透過以上技術,機器經濟網絡建構了“協作激勵”與“價值閉環”,不僅讓機器人“能付錢”,更關鍵的是讓機器人能:
● 依績效取得收入(result-based settlement)
● 按需購買資源(自主成本結構)
● 以鏈上聲譽參與市場競爭(可驗證履約)
這意味著機器人第一次可以參與完整的經濟誘因體系:能工作→ 能賺錢→ 能花錢→ 能獨立優化行為。
總結
展望
綜觀上述三大方向,Web3 在機器人產業中扮演的角色已逐漸清楚:
● 資料層:提供規模化、多來源的資料擷取動力,並改善長尾場景覆蓋;
● 協作層:為跨裝置協作引入統一身分、互通性與任務治理機制;
● 經濟層:透過鏈上支付與可驗證結算,為機器人提供可程式化的經濟行為架構。
這些能力共同為未來潛在的機器互聯網奠定基礎,使機器人能夠在更開放、可審計的技術環境中協作與運作。
不確定性
儘管機器人生態在2025 年迎來罕見的突破,但從「技術可行」邁向「規模化、永續」的過程中,仍面臨多重不確定性。這些不確定性並非來自單一技術瓶頸,而是源自於工程、經濟、市場與制度層面的複雜耦合。
經濟可行性是否真正成立
儘管機器人在感知、控制與智慧層面取得突破,但其規模化部署最終仍取決於真實商業需求與經濟回報是否成立。目前多數人形機器人與通用機器人仍停留在試點與驗證階段,企業是否願意長期為機器人服務付費、OaaS/RaaS 模式能否在不同產業穩定跑通ROI,仍缺乏足夠的長期數據支撐。
同時,機器人在複雜、非結構化環境中的性價比優勢尚未完全確立。在許多場景中,傳統自動化或人工替代方案仍然更便宜、更可靠。這意味著:技術可行並不自動轉化為經濟必然性,而商業化節奏的不確定,將直接影響整個產業的擴張速度。
工程可靠度與維運複雜度的系統性挑戰
機器人產業面臨的最大現實挑戰,往往不在於“能否完成任務”,而在於能否長期、穩定、低成本地運作。在規模化部署中,硬體故障率、維護成本、軟體升級、能耗管理以及安全與責任問題,都會迅速放大為系統性風險。
即便透過OaaS 模式降低了前期資本支出,隱藏在維運、保險、責任與合規中的成本仍可能侵蝕整體商業模式。若可靠性無法跨越商業場景的最低門檻,機器人網路與機器經濟的設想將難以落地。
生態協同、標準收斂與制度適配
機器人生態正同時經歷OS、Agent 框架、區塊鏈協議、支付標準的快速演化,但目前仍高度片段化。跨裝置、跨廠商、跨系統協作的成本較高,通用標準尚未完全收斂,這可能導致生態割裂、重複建造與效率損失。
同時,具備自主決策與經濟行為能力的機器人正在挑戰現有監管與法律框架:責任歸屬、支付合規、資料與安全邊界仍不清楚。若制度與標準無法與技術演進同步,機器經濟網路將面臨合規與落地層面的不確定性。
整體而言,機器人規模化應用的條件正在逐步形成,而機器經濟體系的雛形也在產業實踐中顯現。 Web3 × Robotics 雖然仍處於早期階段,但已展現出值得關注的長期發展潛力。
參考文章
1. https://www.morganstanley.com/insights/articles/humanoid-robot-market-5-trillion-by-2050
5. http://www.xinhuanet.com/tech/20250908/89cc1111e729403ca5af4a397ebd01ce/c.html
7. https://orbilu.uni.lu/bitstream/10993/39438/1/comst-preprint.pdf ?


